1.1_A_grid_world_example
1.1 A grid world example
Consider an example as shown in Figure 1.2, where a robot moves in a grid world. The robot, called agent, can move across adjacent cells in the grid. At each time step, it can
only occupy a single cell. The white cells are accessible for entry, and the orange cells are forbidden. There is a target cell that the robot would like to reach. We will use such grid world examples throughout this book since they are intuitive for illustrating new concepts and algorithms.
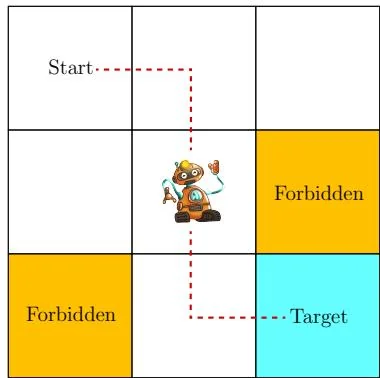
Figure 1.2: The grid world example is used throughout the book.
The ultimate goal of the agent is to find a "good" policy that enables it to reach the target cell when starting from any initial cell. How can the "goodness" of a policy be defined? The idea is that the agent should reach the target without entering any forbidden cells, taking unnecessary detours, or colliding with the boundary of the grid.
It would be trivial to plan a path to reach the target cell if the agent knew the map of the grid world. The task becomes nontrivial if the agent does not know any information about the environment in advance. Then, the agent must interact with the environment to find a good policy by trial and error. To do that, the concepts presented in the rest of the chapter are necessary.