2._为什么引入特征值与特征向量
本章内容总体概述:假设有一头猪,我们要给他拍照,首先会选一个视角,这个视角就是矩阵(你也可以把这个矩阵理解为一个“参照物”),我们可以从不同视角给猪拍照,这些不同的视角和最初的视角是彼此相似的,如何找到不同的视角利用的就是特征值与特征向量。在这些视角里,会有一个比较好的视角(你可以理解为给猪正面拍照),这就是矩阵的对角化。 我们发现不是每个矩阵都可以对角化的,但是实对称矩阵一定可以对角化,所以,我们提出了正交相似(矩阵是一个二维表格,如果是对称矩阵,则他相当于对轴进行了同比例缩放,自然图像不会坍塌)。如果这个对称矩阵的行列式的值为1或者-1,这个矩阵就是正交矩阵。使用正交矩阵产生的变换就是正交变换。当使用正交变换时,图像不变(长度、角度都不变),进一步可以简单的理解为正交变换就是坐标轴的旋转。
从上面的介绍,可以看到,在对矩阵的变换里,我们是层层推进的 (1)先找相似矩阵 (2)在找相似对角化 (3)再找对称矩阵的对角化 (4)再找行列式的值为1或者-1的对称矩阵的对角化,即正交矩阵。 而普通矩阵转为正交矩阵使用的是 施密特正交化工具。
为什么引入特征值与特征向量
引例1
特征值与特征向量反映的是矩阵变换里的不变量(方向不变)。这句话可能不好理解,所以,先看初中学过的凸透镜成像。
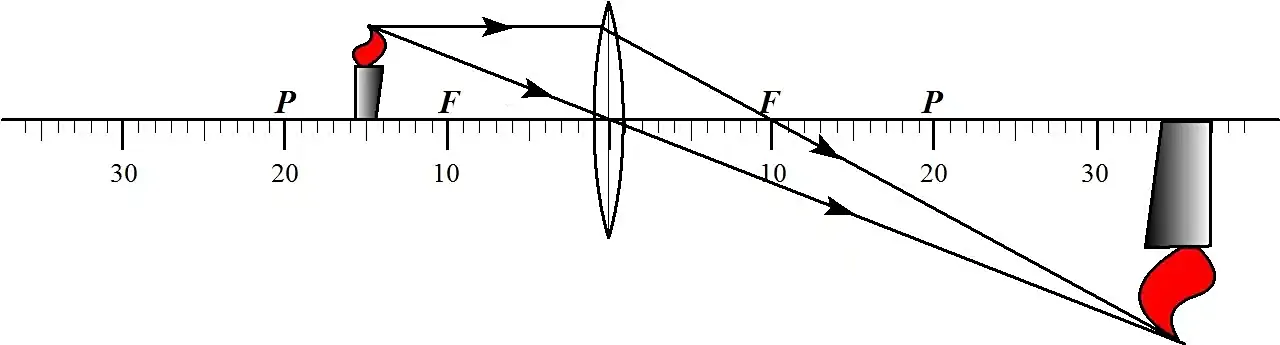
在初中物理里,我们都学过凸透镜成像,凸透镜成像核心口诀有2句:
(1)平行于主轴的光线经过成像后经过焦点
(2)经过凸透镜中心的光线方向不变
这2个直线相交,就获得了“像”的位置,所以,物体成像虽然复杂,但是抓住核心的几个不变点,就能找到像的规律
 {width=600px}
{width=600px}
引例2
矩阵作用向量,会使得向量发生缩放与旋转,但是总有一些向量只伸缩不旋转。因为线性的关系,通常我们只需要抓住几个关键点,就能描述变换的规律。比如 剪切矩阵 K
作用在 上, 如果我们能找到 这两个关键点,那么 自然的 就是 变换后的像,如下图所示
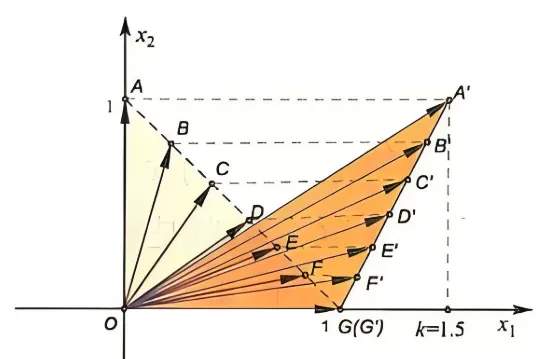
直角三角形 内部的无数向量被水平方向切变到 钝角三角形内部的向量。图中,原向量与被变换的向量由一根根虚线段 连接,因为是水平切变,因此这根虚线段所代表的向量差是水平的。
显然,这些虚线段 所表示的向量变化量是由矩阵 带来的;这些变换量的特点是 线段最长, 线段长度次之, 直到 线段长度变为 0 。这时原向量 ( 坐标单位向量)和变换向量 重合。由特征值和特征向量的定义可知,向量 是矩阵 的特征向量,因为这个特征向量的变化量为 0 ,原向量与被变换向量相等,变换的比例为 1 ,所以特征值是 1 。
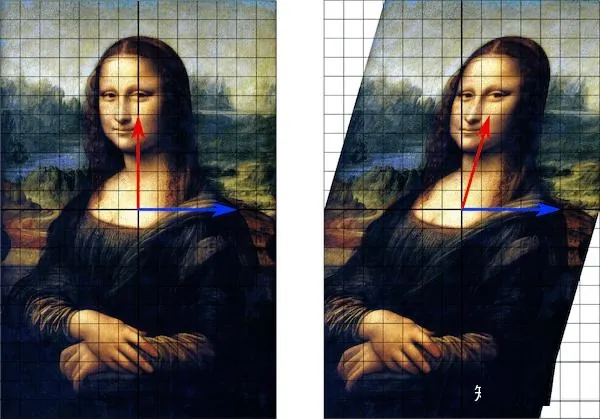
进一步的,复杂图像是由简单几何体构成而成,而几何体由一根根向量组成,这样,对微观向量的改变就会导致宏观图像的改变。下图展示了矩阵作用图片后的水平拉伸效果。
 {width=500px}
{width=500px}
因此,矩阵的特征值和特征向量相当于帮助我们找到矩阵变换里的不变量。
特征值和特征向量的作用
为了方便理解为什么要引入特征值与特性向量,我们先看一个结论:如果有了特征值与特征向量他们有什么作用。 一个简单的作用是可以找到一个新基,在新基下可以实现对图形进行“扶正”。
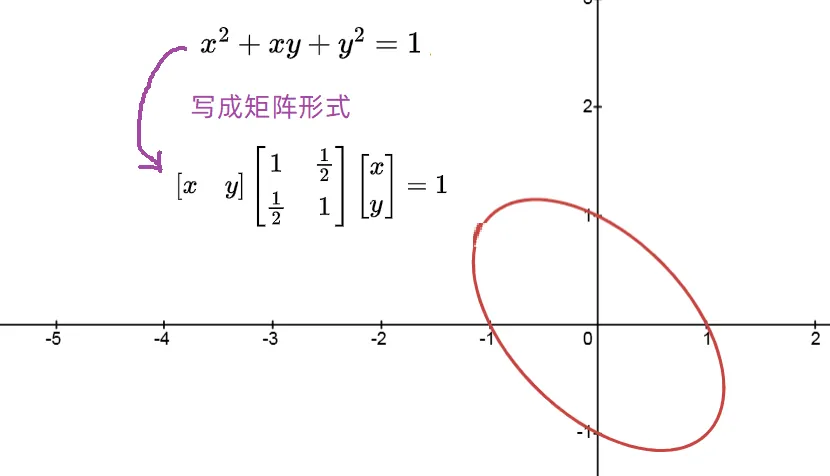
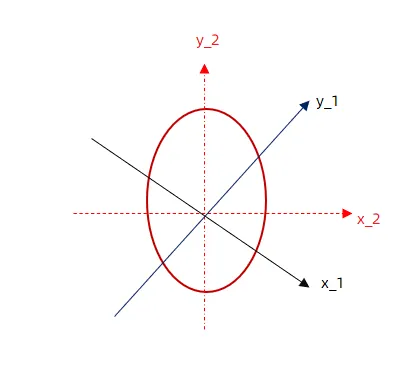
假设给你一个斜椭圆方程 ,画出其图像如下,如果问椭圆长轴长和短轴长是多少,其实并不容易求出,因为他们不是我们遇到的标准椭圆(椭圆的标准方程是 ),但是利用特征值与特征向量就可以把图像扶正。
 {width=500px}
{width=500px}
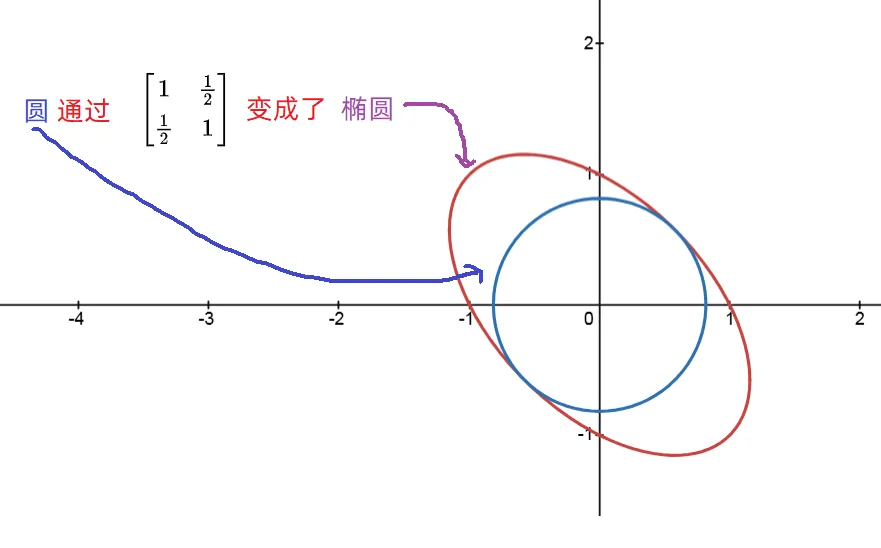
“扶正”的过程可能比较难理解,这时候我们反向思考,如果最开始是一个圆,它通过某个线性变换,拉伸并旋转成了上面的椭圆,我们现在要做的就是看看圆是怎么变成椭圆的。 在这里,要插入一个小知识(关于二次型):因为笛卡尔直角坐标系是最基础的坐标系,所以,所有图形都是以该坐标系为基础,而
表示的正好是单位圆 (即),所以上面的问题可以描述为圆是怎么通过下面的矩阵A变为斜椭圆的。
提示:事实上,圆不应该把他当做由点组成,而应该把圆当做由一个个向量组成。这里直接说由点组成,只是为了方便理解。
 {width=500px}
{width=500px}
矩阵分解
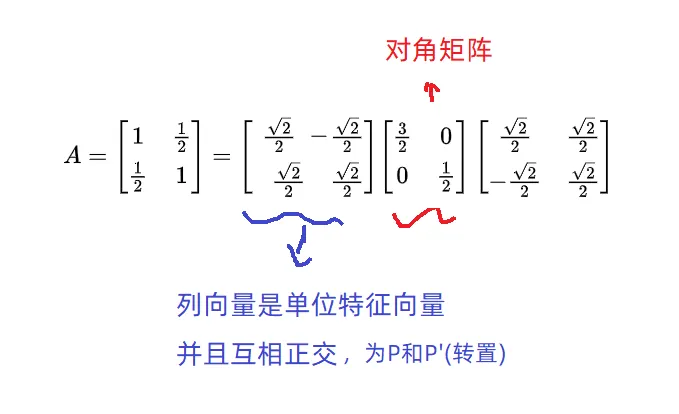
矩阵分解和因式分解类似,比如,把分解为,然后利用 就很容易计算。 矩阵作用于向量,相当于对向量进行了“缩放”和“旋转”,而特征值相当于缩放倍数,特征向量相当于找到了一组正交基。 现在把上面的矩阵A进行分解的,参考下图 (矩阵A分解成了3个矩阵相乘,可能你会疑惑这3个矩阵相乘真的等于吗?你可以自己验算一下,确实等于,即)
 {width=500px}
{width=500px}
对角矩阵的对角线上是特征值,一个矩阵表示的线性变换,只有特征值才有拉伸作用,拉伸方向就是对应的特征向量方向,显然特征值越大拉伸得越长,其它方向上的拉伸都是“被动拉伸”,所以椭圆的长轴就是最大特征值的拉伸结果。
两边的矩阵是旋转矩阵,这里进行了单位化,稍后进行解释,
至此,我们大致能了解“圆”是怎么变成“斜椭圆”的,首先坐标轴先逆时针旋转,接着把圆想象为弹性皮筋,手捏住两端拉伸,往上拉伸了, 往左右拉伸了 , 即可得到斜椭圆。
注意:
是线性变换里常使用的一个旋转 矩阵, 关于旋转矩阵见旋转矩阵
当然后面又乘以了,他是顺时针旋转,相当于再把坐标系再还原回来。
特征值与特征向量的作用
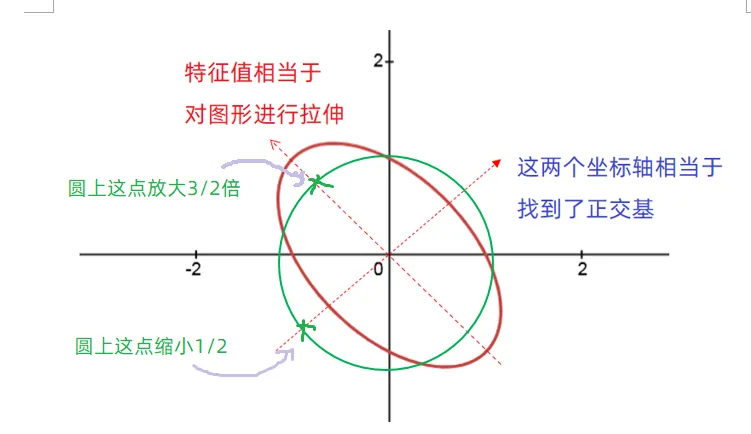
通过上面的操作,可以看到特征向量相当于帮助我们找到了一个正交基,而特征值相当于在找到的正交基里,各个维度缩放的倍数,参考下图红色的虚坐标轴。
 {width=500px}
{width=500px}
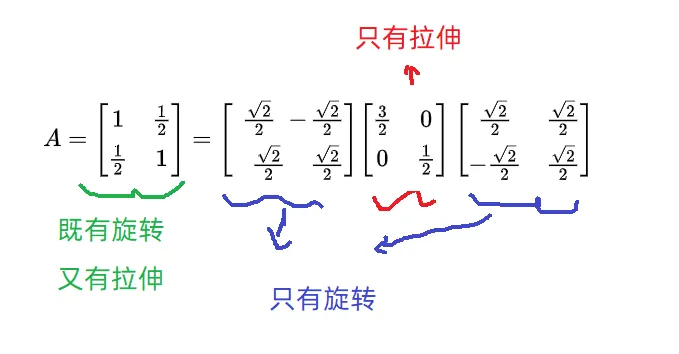
最终,矩阵作用在一个向量上的两个操作(缩放与旋转)被分解为了缩放和旋转,如下图 (, 前面左乘P相当于找到的新基,中间是拉伸,沿着新基的各个方向进行缩放,右边右乘表示变换完了新基再转回来)
 {width=500px}
{width=500px}
从上面介绍可以看到,在红色新坐标系下斜椭圆变成了标准椭圆(为旧坐标系为新坐标系)
为什么要单位化
如果你计算上面A的特征向量将是
但是单位化后变为
这是因为:坐标基单位化后,图形长度不变(在本例中计算长、短半轴长),如果使用作为坐标基,将影响尺寸。
那么,何时需要单位化呢?具体看需求,比如,如果你想测量两个直线的角度,直接矩阵相似即可,不需要单位化,如果需要测量两个线段的距离,就需要单位化。 理解这个思想可以类比全等三角形和相似三角形,如果求角度相似三角形就可以了,如果求长度,就必须使用全等三角形。
通过例题解释特征值域特征向量
特征值与特征向量相当于给我们找到了一个“新坐标系”,特征向量表示图形变换里,方向不变的量,特征值相当于缩放的比例,下面的例题进一步解释了这句话的意思。
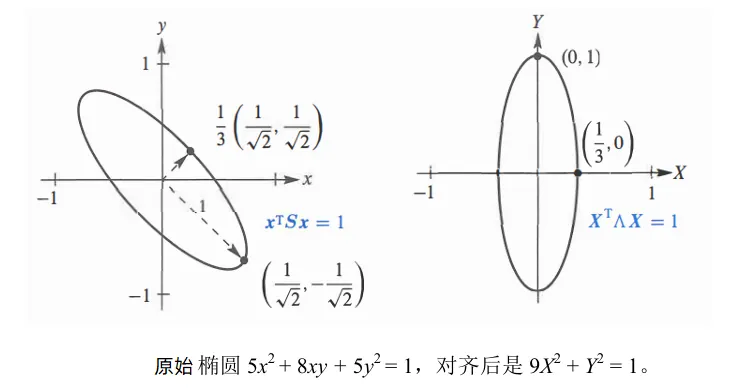
例 求出椭圆 的轴
解析:如果画出他的几何图形,可以看到他是一个斜椭圆,参考下图(左图)。
注意:这里涉及到后面的二次型,我们很容易利用二次型写出他的方程为
得变换矩阵
如果求矩阵的特征值和特征向量,可以得到 ① 当特征值 时,特征向量
① 当特征值 时,特征向量
这意味着,如果我们使用特征向量 建立新坐标系,那么“椭圆”将进行扶正,即变成了标准椭圆,参考下图(右图)。 整个变换可以理解为有三部: 1.原始的椭圆对应 ,它的方程式 对应的矩阵乘法是 。 2.修正后的椭圆对应 ,它的方程式 对应的矩阵乘法 3.使得原始椭圆旋转对齐的旋转矩阵是特征向量矩阵 ,这个 就是后面介绍的 正交矩阵。
注意:对于特征值和特征向量的理解,本文一开始介绍主要是方便了解本质,但是如果每个变换如果都这么想累也累死的,一个通俗的理解是:特征向量找到了一个新的坐标系,把旧坐标系旋转到新坐标系,同时在新坐标系里沿特征值缩放倍数,这么理解就可以了。我们也不用太在意到底是轴还是轴,因为我们研究的都是对称矩阵,对对称矩阵来说,作用在上也是对称的。另外,坐标不变图形变换 和 图形不变坐标变换 有时候说不清。 就像是地球绕着太阳转还是太阳绕着地球转,对分析结果影响不大。
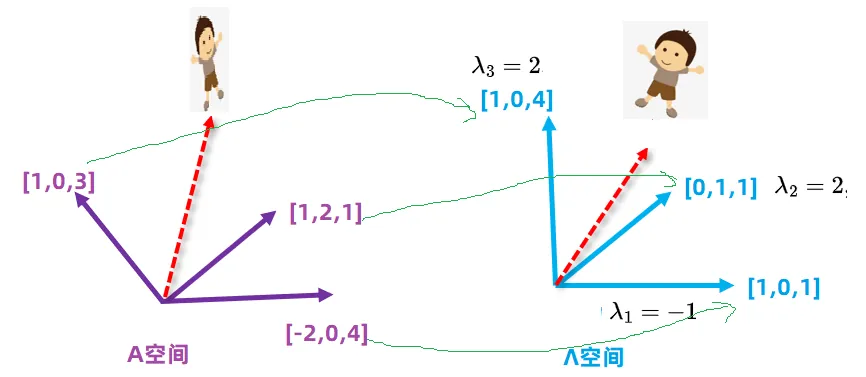
例下面再看一个例题,有一个矩阵
我们计算得到他的特征值和特征向量。并用他的特征向量组成一个新的坐标系,具体求解见矩阵相似
可以求的特征值 和 特征向量 , 具体求解请参考 此处
想象一下你在空间看到的一个小男孩,经过特征转换后,找到了一个新的空间,我们称他为特征空间,在这个特征空间里,你看到的小男孩更简洁、更漂亮。
注意:在上面这个变换后的特征空间里,他的坐标系其实并不一定互相垂直,这里会有一个重要结论:普通矩阵的特征空间不一定互相垂直(数学上证明很难),但是如果是对称矩阵,那么他的特征空间一定互相垂直,所以后面我们主要研究对称矩阵。
本节旨在介绍特征值与特征向量的常见用法,下一节将更深一步探讨特征值和特征向量的意义。