在学习本章时,必须跟进整体向量的思路。比如给你两个向量:a , b a,b a , b a , b a,b a , b
下图展示了我们处理向量的基本过程:给你任意两个向量,我们先让他们正交,再让他们单位化,这就是前面所学的内容。示意图如下小黄脸从不开心到开心再到哈哈大笑。
作为初学者最大的疑问是:怎么又提出正交矩阵这个概念?这是因为一个矩阵乘以一个向量相当于一个线性变换,只有正交矩阵不改变向量根本属性。后面会学到二次型,比如一个圆当使用普通矩阵进行变换时,会变成椭圆(通常长度,角度都会改变),但只有正交变换会让圆仍然保持圆(长度、角度不变,或者把正交矩阵看成坐标轴旋转)
正交矩阵的数学定义及性质 如果 n n n A A A A T A = E A^{\mathrm{T}} A=E A T A = E A A A
设矩阵 A A A n n n A A A n n n A A A R n \mathbf{R}^n R n A A A R n \mathbf{R}^n R n ⇔ ( 2 ) \Leftrightarrow(2) ⇔ ( 2 ) A A A A = ( α 1 , α 2 , ⋯ , α n ) A=\left(\alpha_1, \alpha_2, \cdots, \alpha_n\right) A = ( α 1 , α 2 , ⋯ , α n ) A A A n n n A T A = E A^T A=E A T A = E ( α 1 T α 2 2 ⋮ a n 2 ) ( α 1 , α 2 , ⋯ , α n ) = ( 1 0 ⋯ 0 0 1 ⋯ 0 ⋮ ⋱ ⋱ ⋮ 0 0 ⋯ 1 ) \left(\begin{array}{l}\alpha_1^T \\ \alpha_2^2 \\ \vdots \\ a_n^2\end{array}\right)\left(\alpha_1, \alpha_2, \cdots, \alpha_n\right)=\left(\begin{array}{cccc}1 & 0 & \cdots & 0 \\ 0 & 1 & \cdots & 0 \\ \vdots & \ddots & \ddots & \vdots \\ 0 & 0 & \cdots & 1\end{array}\right) α 1 T α 2 2 ⋮ a n 2 ( α 1 , α 2 , ⋯ , α n ) = 1 0 ⋮ 0 0 1 ⋱ 0 ⋯ ⋯ ⋱ ⋯ 0 0 ⋮ 1 α i ⊤ α j = δ i j = { 1 , 当 i = j , 0 , 当 i ≠ j ( i , j = 1 , 2 , ⋯ , n ) \quad \boldsymbol{\alpha}_i^{\top} \boldsymbol{\alpha}_j=\delta_{i j}=\left\{\begin{array}{ll}1, & \text { 当 } i=j, \\ 0, & \text { 当 } i \neq j\end{array}(i, j=1,2, \cdots, n)\right. α i ⊤ α j = δ ij = { 1 , 0 , 当 i = j , 当 i = j ( i , j = 1 , 2 , ⋯ , n ) A A A n n n R n \mathbf{R}^n R n
(1) ⇔ ( 3 ) : 因为 A T A = E 与 A A T = E 等价,所以将矩阵 A 按行分块 A = ( β T β 2 ⊤ ⋮ β n ⊤ ) , \text { (1) } \Leftrightarrow(3) \text { : 因为 } A^T A=E \text { 与 } A A^T=E \text { 等价,所以将矩阵 } A \text { 按行分块 } A=\left(\begin{array}{c}
\beta^T \\
\beta_2^{\top} \\
\vdots \\
\beta_n^{\top}
\end{array}\right) \text {, } (1) ⇔ ( 3 ) : 因为 A T A = E 与 A A T = E 等价,所以将矩阵 A 按行分块 A = β T β 2 ⊤ ⋮ β n ⊤ , 于是公式 A A T = E A A^T=E A A T = E
A A ⊤ = ( β ⊤ β 2 ⊤ ⋮ β n ⊤ ) ( β 1 , β 2 , ⋯ , β n ) = ( 1 0 ⋯ 0 0 1 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ 1 ) , A A^{\top}=\left(\begin{array}{c}
\beta^{\top} \\
\beta_2^{\top} \\
\vdots \\
\beta_n^{\top}
\end{array}\right)\left(\beta_1, \beta_2, \cdots, \beta_n\right)=\left(\begin{array}{cccc}
1 & 0 & \cdots & 0 \\
0 & 1 & \cdots & 0 \\
\vdots & \vdots & \ddots & \vdots \\
0 & 0 & \cdots & 1
\end{array}\right), A A ⊤ = β ⊤ β 2 ⊤ ⋮ β n ⊤ ( β 1 , β 2 , ⋯ , β n ) = 1 0 ⋮ 0 0 1 ⋮ 0 ⋯ ⋯ ⋱ ⋯ 0 0 ⋮ 1 , 所以
β i T β j = δ i j = { 1 , 当 i = j , 0 , 当 i ≠ j ( i , j = 1 , 2 , ⋯ , n ) , \boldsymbol{\beta}_i^T \boldsymbol{\beta}_j=\boldsymbol{\delta}_{i j}=\left\{\begin{array}{ll}
1, & \text { 当 } i=j, \\
0, & \text { 当 } i \neq j
\end{array} \quad(i, j=1,2, \cdots, n),\right. β i T β j = δ ij = { 1 , 0 , 当 i = j , 当 i = j ( i , j = 1 , 2 , ⋯ , n ) , 即: A A A n n n R n \mathbf{R}^n R n
克罗内克函数 现在跳脱线性代数,仅从高中函数的角度看δ i j \boldsymbol{\delta}_{i j} δ ij i = j i=j i = j i ≠ j i \ne j i = j
δ i j = { 1 , 当 i = j , 0 , 当 i ≠ j ( i , j = 1 , 2 , ⋯ , n ) , \boldsymbol{\delta}_{i j}=\left\{\begin{array}{ll}
1, & \text { 当 } i=j, \\
0, & \text { 当 } i \neq j
\end{array} \quad(i, j=1,2, \cdots, n),\right. δ ij = { 1 , 0 , 当 i = j , 当 i = j ( i , j = 1 , 2 , ⋯ , n ) , 这个函数被称作克罗内克函数,他完美地同时概括了“标准”和“正交”两个条件
数学性质 1.正交矩阵的逆:Q T = Q − 1 Q^T=Q^{-1} Q T = Q − 1 = = =
2.正交矩阵的行列式:行列式的取值只有两种可能(1)或(-1);
这个证明比较简单,因为 A T A = E A^T A=E A T A = E ∣ A T A ∣ = ∣ E ∣ = > ∣ A ∣ = 1 o r ∣ A ∣ = − 1 |A^TA|=|E|=>|A|=1 or |A|=-1 ∣ A T A ∣ = ∣ E ∣ => ∣ A ∣ = 1 or ∣ A ∣ = − 1
3.向量正交:将 Q Q Q Q Q Q
4.保持长度不变:Q x ⃗ = y ⃗ Q \vec{x}=\vec{y} Q x = y Q Q Q x x x y y y x x x ∥ x ⃗ ∥ = ∥ y ⃗ ∥ \|\vec{x}\|=\|\vec{y}\| ∥ x ∥ = ∥ y ∥
5.保持角度不变:如果有两个向量 x 1 → , x 2 → \overrightarrow{x_1}, \overrightarrow{x_2} x 1 , x 2 ( θ ) (\theta) ( θ ) x 1 → , x 2 → \overrightarrow{x_1}, \overrightarrow{x_2} x 1 , x 2 Q x 1 → , Q x 2 → Q \overrightarrow{x_1}, Q \overrightarrow{x_2} Q x 1 , Q x 2 ( θ ) (\theta) ( θ )
总之,在正交矩阵下,一个图像保持不变。
例假设存在一个矩阵 A = [ 2 2 − 2 2 2 2 2 2 ] A=\left[\begin{array}{cc}\frac{\sqrt{2}}{2} & -\frac{\sqrt{2}}{2} \\\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2}\end{array}\right] A = [ 2 2 2 2 − 2 2 2 2 ] a = ( 2 , 2 ) a=(2,2) a = ( 2 , 2 ) b = ( − 1 , 1 ) b=(-1,1) b = ( − 1 , 1 )
解:容易验证:他是方阵,他的模长为2 2 2 + ( 2 2 ) 2 = 1 \sqrt{\frac{\sqrt{2}}{2}^2 + (\frac{\sqrt{2}}{2})^2}=1 2 2 2 + ( 2 2 ) 2 = 1 A A A
此时我们要将自然基下的一个坐标 x ( 2 , 2 ) x(2,2) x ( 2 , 2 ) A A A A − 1 [ x ] E = [ x ] A A^{-1}[x]_E=[x]_A A − 1 [ x ] E = [ x ] A A − 1 A^{-1} A − 1
A − 1 = A T = [ 2 2 2 2 − 2 2 2 2 ] A^{-1}=A^T=\left[\begin{array}{cc}
\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} \\
-\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2}
\end{array}\right] A − 1 = A T = [ 2 2 − 2 2 2 2 2 2 ] 第二步:代入坐标转换公式
A − 1 [ x ] E = [ 2 2 2 2 − 2 2 2 2 ] [ 2 2 ] = [ 2 2 0 ] A^{-1}[x]_E=\left[\begin{array}{cc}
\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} \\
-\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2}
\end{array}\right]\left[\begin{array}{l}
2 \\
2
\end{array}\right]=\left[\begin{array}{c}
2 \sqrt{2} \\
0
\end{array}\right] A − 1 [ x ] E = [ 2 2 − 2 2 2 2 2 2 ] [ 2 2 ] = [ 2 2 0 ] 即:[ x ] a = [ 2 2 0 ] [x]_a=\left[\begin{array}{c}2 \sqrt{2} \\ 0\end{array}\right] [ x ] a = [ 2 2 0 ]
同理可的 [ x ] b = [ 0 2 ] [x]_b=\left[\begin{array}{c}0 \\ \sqrt{2} \end{array}\right] [ x ] b = [ 0 2 ]
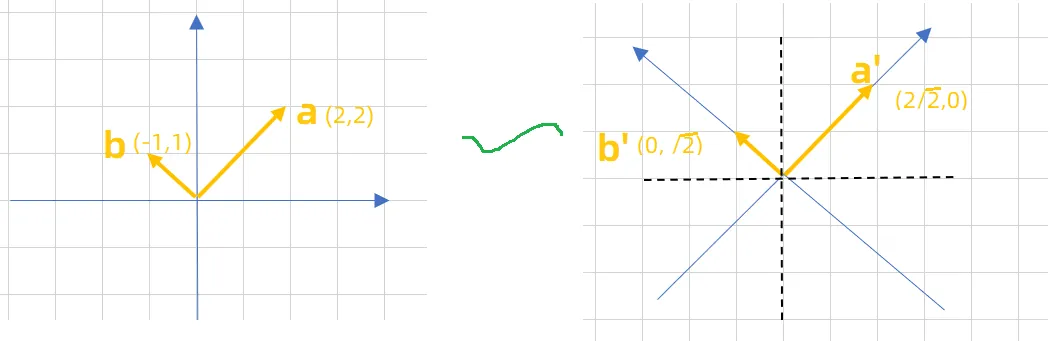
下图显示了上面正交矩阵的作用。一个向量a = ( 2 , 2 ) a=(2,2) a = ( 2 , 2 ) b = ( − 1 , 1 ) b=(-1,1) b = ( − 1 , 1 ) a ′ = ( 2 2 , 0 ) a'=(2\sqrt{2},0) a ′ = ( 2 2 , 0 ) b ′ = ( 0 , 2 ) b'=(0,\sqrt{2}) b ′ = ( 0 , 2 ) a , b a,b a , b a , b a,b a , b
事实上,矩阵A如果写成下面形式,你就发现他本身就是一个 旋转矩阵
A − 1 = A T = [ c o s 45 ∘ − c o s 45 ∘ c o s 45 ∘ c o s 45 ∘ ] A^{-1}=A^T=\left[\begin{array}{cc}
cos 45^{\circ} & -cos 45^{\circ} \\
cos 45^{\circ} & cos 45^{\circ}
\end{array}\right] A − 1 = A T = [ cos 4 5 ∘ cos 4 5 ∘ − cos 4 5 ∘ cos 4 5 ∘ ] 总之,对于正交矩阵,你可以理解为,在正交矩阵下图形会保持原有的长度和角度。 两个向量长度和夹角都保持不变。
为啥又搞出一个正交矩阵? 考虑下面两个矩阵:
A T A = E A^{T} A=E A T A = E A − 1 A = E A^{-1} A=E A − 1 A = E
如果A T = A − 1 A^{T} =A^{-1} A T = A − 1
正交矩阵不改变图形的性质。
做一个简单的类别:
矩阵变换 类比 相似三角形
正交变换 类比 全等三角形
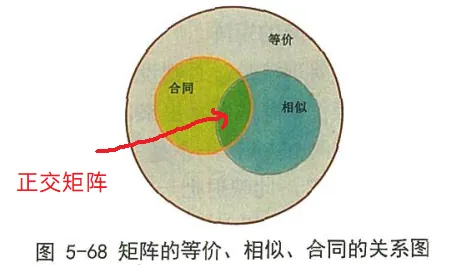
矩阵会有三大性质:等价、相似与合同。而正交矩阵是相似与合同的交集,因此具有最优秀的性质。
在前面介绍过,相似变换,相当于从不同的视角看图片,而正交变换可以看成从正面垂直角度看,具有最好的视角。
例验证矩阵 P = ( 1 2 − 1 2 − 1 2 1 2 − 1 2 − 1 2 1 2 1 2 − 1 2 1 2 − 1 2 1 2 1 2 1 2 1 2 1 2 ) P=\left(\begin{array}{cccc}\frac{1}{2} & -\frac{1}{2} & -\frac{1}{2} & \frac{1}{2} \\ -\frac{1}{2} & -\frac{1}{2} & \frac{1}{2} & \frac{1}{2} \\ -\frac{1}{2} & \frac{1}{2} & -\frac{1}{2} & \frac{1}{2} \\ \frac{1}{2} & \frac{1}{2} & \frac{1}{2} & \frac{1}{2}\end{array}\right) P = 2 1 − 2 1 − 2 1 2 1 − 2 1 − 2 1 2 1 2 1 − 2 1 2 1 − 2 1 2 1 2 1 2 1 2 1 2 1 P P P P P P A A A A − 1 = A T A ^{-1}= A ^{ T } A − 1 = A T ∣ A ∣ = 1 | A |=1 ∣ A ∣ = 1 A A A B B B A B A B A B
正交变换的定义 若 P P P y = P x y=P x y = P x y = P x y=P x y = P x ∥ y ∥ = y T y = x T P T P x = x T x = ∥ x ∥ \| y \|=\sqrt{y^{ T } y }=\sqrt{ x ^{ T } P ^{ T } P x }=\sqrt{ x ^{ T } x }=\| x \| ∥ y ∥ = y T y = x T P T P x = x T x = ∥ x ∥ 正交变换保持向量的长度不变 .
矩阵对称时的特征值分解 如果矩阵是对称的,那么矩阵的特征值分解实际上可以是一种非常简单但有用的形式。
对于一个 n × n n \times n n × n A A A
A = Q Λ Q T . . . ( 1 ) A=Q \Lambda Q^T ...(1) A = Q Λ Q T ... ( 1 ) 其中:
Q Q Q A A A
Λ \Lambda Λ
如果我们把(1)写成类似矩阵相似的形式
A = Q Λ Q − 1 . . . ( 2 ) A=Q \Lambda Q^{-1} ...(2) A = Q Λ Q − 1 ... ( 2 ) 比较(1)(2),如果 Q T = Q − 1 Q^T =Q^{-1} Q T = Q − 1
注意到我们上次所做的普通正方形矩阵特征分解的区别了吗?是的,现在具有特征向量的矩阵实际上是正交的, 因此矩阵的逆可以用转置来代替, 这比处理逆容易得多。
例已知矩阵 A = ( 0 − 1 1 2 − 3 0 0 0 0 ) A=\left(\begin{array}{ccc}0 & -1 & 1 \\ 2 & -3 & 0 \\ 0 & 0 & 0\end{array}\right) A = 0 2 0 − 1 − 3 0 1 0 0 A 99 A^{99} A 99
解:(1) 通过解方程可得特征值,即有
∣ λ E − A ∣ = A = ( λ 1 − 1 − 2 λ + 3 0 0 0 λ ) = 0 ⇒ λ 1 = 0 , λ 2 = − 1 , λ 3 = − 2. \begin{aligned}
& |\lambda E-A|=A=\left(\begin{array}{ccc}
\lambda & 1 & -1 \\
-2 & \lambda+3 & 0 \\
0 & 0 & \lambda
\end{array}\right)=0 \\
& \Rightarrow \lambda_1=0, \lambda_2=-1, \lambda_3=-2 .
\end{aligned} ∣ λ E − A ∣ = A = λ − 2 0 1 λ + 3 0 − 1 0 λ = 0 ⇒ λ 1 = 0 , λ 2 = − 1 , λ 3 = − 2. 由此可得各特征值对应的特征向量为为
v 1 = ( 3 2 2 ) , v 2 = ( 1 1 0 ) , v 3 = ( 1 2 0 ) . v_1=\left(\begin{array}{l}
3 \\
2 \\
2
\end{array}\right), v_2=\left(\begin{array}{l}
1 \\
1 \\
0
\end{array}\right), v_3=\left(\begin{array}{l}
1 \\
2 \\
0
\end{array}\right) . v 1 = 3 2 2 , v 2 = 1 1 0 , v 3 = 1 2 0 . 把三个特征向量构成的矩阵记作
P = ( v 1 , v 2 , v 1 ) = ( 3 1 1 2 1 2 2 0 0 ) P=\left(v_1, v_2, v_1\right)=\left(\begin{array}{lll}
3 & 1 & 1 \\
2 & 1 & 2 \\
2 & 0 & 0
\end{array}\right) P = ( v 1 , v 2 , v 1 ) = 3 2 2 1 1 0 1 2 0 从而有
P − 1 A P = ( 0 0 0 0 − 1 0 0 0 − 2 ) . P^{-1} A P=\left(\begin{array}{ccc}
0 & 0 & 0 \\
0 & -1 & 0 \\
0 & 0 & -2
\end{array}\right) . P − 1 A P = 0 0 0 0 − 1 0 0 0 − 2 . 于是由求矩阵幂的特征值法,可得
A 99 = P ( 0 0 0 0 − 1 0 0 0 − 2 ) 99 P − 1 A^{99}=P\left(\begin{array}{ccc}
0 & 0 & 0 \\
0 & -1 & 0 \\
0 & 0 & -2
\end{array}\right)^{99} P^{-1} A 99 = P 0 0 0 0 − 1 0 0 0 − 2 99 P − 1 容易求得矩阵 P \boldsymbol{P} P
P − 1 = ( 0 0 1 2 2 − 1 − 2 − 1 1 1 2 ) P^{-1}=\left(\begin{array}{ccc}
0 & 0 & \frac{1}{2} \\
2 & -1 & -2 \\
-1 & 1 & \frac{1}{2}
\end{array}\right) P − 1 = 0 2 − 1 0 − 1 1 2 1 − 2 2 1 把 P P P P − 1 P^{-1} P − 1 ( ∗ ) \left(^*\right) ( ∗ )
A 99 = P ( 0 0 0 0 − 1 0 0 0 − 2 ) 99 P − 1 = ( 3 1 1 2 1 2 2 0 0 ) ( 0 0 0 0 − 1 0 0 0 − 2 99 ) ( 0 0 1 2 2 − 1 − 2 − 1 1 1 2 ) = ( − 2 + 2 99 1 − 2 99 2 − 2 98 − 2 + 2 100 1 − 2 100 2 − 2 99 0 0 0 ) . \begin{aligned}
& A^{99}=P\left(\begin{array}{ccc}
0 & 0 & 0 \\
0 & -1 & 0 \\
0 & 0 & -2
\end{array}\right)^{99} P^{-1} \\
& =\left(\begin{array}{lll}
3 & 1 & 1 \\
2 & 1 & 2 \\
2 & 0 & 0
\end{array}\right)\left(\begin{array}{ccc}
0 & 0 & 0 \\
0 & -1 & 0 \\
0 & 0 & -2^{99}
\end{array}\right)\left(\begin{array}{ccc}
0 & 0 & \frac{1}{2} \\
2 & -1 & -2 \\
-1 & 1 & \frac{1}{2}
\end{array}\right) \\
& =\left(\begin{array}{ccc}
-2+2^{99} & 1-2^{99} & 2-2^{98} \\
-2+2^{100} & 1-2^{100} & 2-2^{99} \\
0 & 0 & 0
\end{array}\right) . \\
&
\end{aligned} A 99 = P 0 0 0 0 − 1 0 0 0 − 2 99 P − 1 = 3 2 2 1 1 0 1 2 0 0 0 0 0 − 1 0 0 0 − 2 99 0 2 − 1 0 − 1 1 2 1 − 2 2 1 = − 2 + 2 99 − 2 + 2 100 0 1 − 2 99 1 − 2 100 0 2 − 2 98 2 − 2 99 0 . 这题来自2016年全国硕士研究生招生统一考试数学试题及详细参考解答(数三),通过这道题感受《线性代数》的魅力,比如A 99 A^{99} A 99
从上面例子会得出后面二次型介绍的 实对称矩阵的对角化
例 设 3 阶矩阵 A A A λ 1 = 1 , λ 2 = 2 \lambda_1=1, \lambda_2=2 λ 1 = 1 , λ 2 = 2 λ 3 = 3 \lambda_3=3 λ 3 = 3
α 1 = ( 1 , 1 , 1 ) T , α 2 = ( 1 , 2 , 3 ) T , α 3 = ( 1 , 3 , 6 ) T , \alpha_1=(1,1,1)^T, \alpha_2=(1,2,3)^T, \alpha_3=(1,3,6)^T \text {, } α 1 = ( 1 , 1 , 1 ) T , α 2 = ( 1 , 2 , 3 ) T , α 3 = ( 1 , 3 , 6 ) T , 求:(1)矩阵 A A A A T A^T A T
解(1)由于 3 阶矩阵 A A A A A A P = ( α 1 , α 2 , α 3 ) P=\left(\alpha_1, \alpha_2, \alpha_3\right) P = ( α 1 , α 2 , α 3 ) P = [ 1 1 1 1 2 3 1 3 6 ] P=\left[\begin{array}{lll}1 & 1 & 1 \\ 1 & 2 & 3 \\ 1 & 3 & 6\end{array}\right] P = 1 1 1 1 2 3 1 3 6 P − 1 = [ 3 − 3 1 − 3 5 − 2 1 − 2 1 ] P^{-1}=\left[\begin{array}{rrr}3 & -3 & 1 \\ -3 & 5 & -2 \\ 1 & -2 & 1\end{array}\right] P − 1 = 3 − 3 1 − 3 5 − 2 1 − 2 1
P − 1 A P = Λ = [ 1 2 3 ] P^{-1} A P=\Lambda=\left[\begin{array}{lll}
1 & & \\
& 2 & \\
& & 3
\end{array}\right] P − 1 A P = Λ = 1 2 3 可知,
A = P ∧ P − 1 = [ 1 1 1 1 2 3 1 3 6 ] [ 1 0 0 0 2 0 0 0 3 ] [ 3 − 3 1 − 3 5 − 2 1 − 2 1 ] = [ 0 1 0 0 − 1 2 3 − 9 7 ] . A=P \wedge P^{-1}=\left[\begin{array}{lll}
1 & 1 & 1 \\
1 & 2 & 3 \\
1 & 3 & 6
\end{array}\right]\left[\begin{array}{lll}
1 & 0 & 0 \\
0 & 2 & 0 \\
0 & 0 & 3
\end{array}\right]\left[\begin{array}{rrr}
3 & -3 & 1 \\
-3 & 5 & -2 \\
1 & -2 & 1
\end{array}\right]=\left[\begin{array}{rrr}
0 & 1 & 0\\
0 & -1 & 2 \\
3 & -9 & 7
\end{array}\right] \text {. } A = P ∧ P − 1 = 1 1 1 1 2 3 1 3 6 1 0 0 0 2 0 0 0 3 3 − 3 1 − 3 5 − 2 1 − 2 1 = 0 0 3 1 − 1 − 9 0 2 7 . (2)由于 A A A A T A^T A T A T A^T A T λ 1 = 1 , λ 2 = 2 , λ 3 = 3 \lambda_1=1, \lambda_2=2, \lambda_3=3 λ 1 = 1 , λ 2 = 2 , λ 3 = 3
由 P − 1 A P = Λ P^{-1} A P=\Lambda P − 1 A P = Λ P T A T ( P − 1 ) T = Λ P^T A^T\left(P^{-1}\right)^T=\Lambda P T A T ( P − 1 ) T = Λ
其中
( P − 1 ) T = [ 3 − 3 1 − 3 5 − 2 1 − 2 1 ] \left(P^{-1}\right)^T=\left[\begin{array}{rrr}
3 & -3 & 1 \\
-3 & 5 & -2 \\
1 & -2 & 1
\end{array}\right] ( P − 1 ) T = 3 − 3 1 − 3 5 − 2 1 − 2 1 因此,与 A T A^T A T λ 1 = 1 , λ 2 = 2 , λ 3 = 3 \lambda_1=1, \lambda_2=2, \lambda_3=3 λ 1 = 1 , λ 2 = 2 , λ 3 = 3
c 1 [ 3 − 3 1 ] , c 2 [ − 3 5 − 2 ] , c 3 [ 1 − 2 1 ] c_1\left[\begin{array}{r}
3 \\
-3 \\
1
\end{array}\right], c_2\left[\begin{array}{r}
-3 \\
5 \\
-2
\end{array}\right], c_3\left[\begin{array}{r}
1 \\
-2 \\
1
\end{array}\right] c 1 3 − 3 1 , c 2 − 3 5 − 2 , c 3 1 − 2 1 其中 c 1 , c 2 , c 3 c_1, c_2, c_3 c 1 , c 2 , c 3 A T A^T A T P − 1 A P = Λ P^{-1} A P=\Lambda P − 1 A P = Λ