约当Jordan标准型
我们知道,并不是每一个 n 阶矩阵 A 都可以对角化.但是,我们可以证明,A 一定能与另一种结构较简单的约当形矩阵相似。由于相关理论证明较复杂,我们只介绍与约当标准形有关的结论。
Jordan标准型
形如
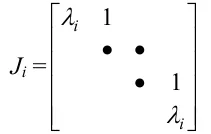
Ji=λi1λi1⋱⋱⋱1λi 的方阵,称为特征值 λi 的约当块.而称主对角线上为若干个约当块的分块矩阵
J=J1J2⋱Js (其中 Ji(i=1,2,⋯,s) 为约当块)
为约当形矩阵,或约当标准形.
例如,
200120012,000100010,[−101−1] 都是约当块.显然,约当形矩阵是一种特殊的上三角形矩阵,其特征值就是卉主对角线上的全部元素。由于一个元素可以看作一个一阶约当块,所以,对角矩阵实际上就是主对角线上全为一阶约当块的约当形矩阵。
我们不加证明地给出如下结论:
定理
在复数范围内,任一 n 阶矩阵 A 都相似于一个约当形矩阵 J ,即存在可逆矩阵 P ,使得 P−1AP=J.J 的主对角线上的元素恰好是 A 的特征值,并且在 J 的主对角线上 A 的任一特征值出现的次数等于该特征值的重数.
约当Jordan标准型的简单解释
对于一个方程,如果有P−1AP=Λ 就说他是相似对角形,但是 假设 A 有 s 个无关的特征向量,则它与有 s 个方块的对角形矩阵相似,每个方块有一个特征值在对角线。
 换句话说,我们可以把Jordan标准型 理解为分块矩阵
比如下面的矩阵
换句话说,我们可以把Jordan标准型 理解为分块矩阵
比如下面的矩阵
200000120000005000000000000100000010 是一个六阶约当形矩阵,它由三个约当块组成(把他进行分解)。
Jordan在实际计算上也不流行,而且它的计算也不稳定,A的一点轻微变化就会分离重复的特征值,并且移除非对角线, 因此使用的并不多,稍微了解即可。
矩阵为什么对角化
矩阵对角化本质是找到一组正交坐标系,使矩阵作用简化为各坐标轴方向的伸缩变换
矩阵对角化的通俗解释可以从“换坐标系”的角度理解,目的是让复杂的矩阵运算变得像“数数”一样简单。以下是分步说明:
为什么需要“对角化”
想象你有一个遥控器(矩阵),每个按键控制不同的功能(矩阵的列)。但遥控器设计得太复杂,按下按键时多个功能同时触发(矩阵运算混乱)。
对角化的目标:重新设计遥控器,让每个按键只控制一个独立功能(矩阵运算简化为缩放)。
对角矩阵就像一个“完美遥控器”,每个按键只负责放大或缩小某个信号,互不干扰。
对角化的核心步骤
找特征向量(新坐标轴)
特征向量是矩阵变换中方向不变的向量。例如,旋转矩阵的特征向量是旋转轴,拉伸矩阵的特征向量是拉伸方向。
特征值:对应方向上的缩放比例(比如拉伸2倍,缩放0.5倍)。
用特征向量组成新基(新遥控器按键)
将特征向量排成矩阵 P,相当于建立一组新坐标系。例如,原坐标系是直角坐标系,新坐标系可能是倾斜的,但更符合矩阵的“性格”。
对角矩阵(简化后的遥控器)
通过 P−1AP=Λ,原矩阵 A 被转化为对角矩阵 Λ,对角线上的元素就是特征值。此时,矩阵运算(如求幂)只需对每个特征值单独操作。
通俗类比
陀螺旋转
• 原坐标系下,陀螺的运动轨迹复杂。
• 若以旋转轴为新坐标系,陀螺的运动只是绕轴旋转,其他方向无变化(对角矩阵的“缩放”效果)。
遥控器优化
• 原遥控器按键混乱(普通矩阵)。
• 对角化后,每个按键只控制音量、频道等单一功能(对角矩阵的独立缩放)。
对角化的意义
简化计算
• 计算矩阵的100次幂:对角矩阵只需对每个特征值取100次幂,普通矩阵需连乘100次。
• 例子:计算 A100,若 A=PDP−1,则 A100=PD100P−1。
揭示本质
• 特征值代表矩阵的“核心作用力”(如量子力学中的能量本征值)。
• 特征向量代表“作用方向”(如力学中的主应力方向)。
解决实际问题
• 图像处理:PCA通过协方差矩阵对角化提取图像主特征。
• 微分方程:将方程组解耦为独立方程,便于求解。
什么矩阵能对角化?
• 实对称矩阵:必可对角化,且特征向量正交(如力学中的应力矩阵)。
• 一般矩阵:需满足有 n 个线性无关的特征向量(如非重复特征值的矩阵)。
总之,矩阵对角化就像给矩阵“换一副眼镜”,让它原本模糊的作用变得清晰可见。通过找到最自然的坐标系(特征向量基),复杂变换被分解为简单的缩放操作。无论是量子力学中的粒子行为,还是抖音推荐算法中的用户兴趣分析,对角化都在背后默默简化问题。
实对称矩阵的对角化
在矩阵里,介绍了矩阵的转置,矩阵的转置最主要的作用就是判断一个矩阵是不是对称矩阵。
如果矩阵A是对称矩阵,那么AT=A,反之,如果AT=A,那么这个矩阵是对称矩阵。 ,而二次型就是对称矩阵,所以,此时矩阵的转置就派上了用场。
定理1 不是每个矩阵都可以对角化,但是实对称矩阵一定可以对角化。这句话另外一个表述是:一个 n×n 矩阵 A 可正交对角化的充分必要条件是 A 是对称矩阵.
证明略。
这个定理相当奇妙,我们很难推断一个矩阵可以对角化,但是每个对称矩阵却可以对角化。即每个对称矩阵D都可以相似对角形
D∼λ110λ22⋱0λnn 我们为什么特别关心实对称矩阵?我们看一下相似与合同
合同是
CTAC=B
相似是
C−1AC=B
仔细看,如果CT=C−1 多好啊,这样就又相似又合同,还真有,那就是正交相似,详见 附录2
例题
例 对角化矩阵 A=6−2−1−26−1−1−15.
解:不难发现,这是一个对称矩阵。
A 的特征方程是
0=−λ3+17λ2−90λ+144=−(λ−8)(λ−6)(λ−3) 通过标准计算可得到每个特征子空间的一个基
①当 λ=8 ,特征向量为
α1=−110 ②当 λ=6 ,特征向量为
α2=−1−12 ③ 当 λ=3 ,特征向量为
α3=111 把α1,α2,α3竖着排列起来,形成一个矩阵,
{α1,α2,α3} 容易看到这是一个正交集(这就相当于我们在三维空间里找到了3个两两互相垂直的坐标轴,但还不是单位坐标轴)。
如果他是单位矩阵,可以有更多性质,现在对α1,α2,α3进行单位化,得到单位特征向量.
u1=−1/21/20,u2=−1/6−1/62/6,u3=1/31/31/3P=−1/21/20−1/6−1/62/61/31/31/3,D=800060003 那么有 A=PDP−1, 和平常一样. 由于 P 是方阵且有正交列, 所以, P 是一个正交矩阵, 而 P−1 就是 P⊤
定理2
如果 A 是对称矩阵, 那么不同特征空间的任意两个特征向量是正交的.
证 设 v1 和 v2 是对应不同特征值 λ1,λ2 的特征向量. 为证明 ν1⋅v2=0, 计算
λ1v1⋅v2=(λ1v1)Tv2=(Av1)T⋅v2=(v1⊤A⊤)v2=v1⊤(Av2)=v1T(λ2v2)=λ2v1⊤v2=λ2v1⋅v2 因此 (λ1−λ2)v1⋅v2=0, 但是 λ1=λ2, 所以 v1⋅v2=0.
通过定理1和定理2我们得到如下一个重要结论:
实对称矩阵的特征值都是实数,而且不同特征值对应的特征向量相互正交。这一点很重要,因为普通矩阵对角化不一定能找到正交矩阵,但实对称矩阵可以,这是一个关键点。
例 将 A=3−24−262423 正交对角化, 其特征方程为
0=−λ3+12λ2−21λ−98=−(λ−7)2(λ+2) 解 通过计算可得特征空间的基:
λ=7:v1=101,v2=−1/210,λ=−2:v3=−1−1/21 因为v1,v2 对应特征值是7,而v3 对应特征值是2,他们是不同的,所以v1,v2 分别与v3 正交,但是v1,v2并不正交。
如果我们要在三维空间找到3个两两互相垂直的向量,就需要使用 施密特正交化 ,容易找到 v2 在 v1 上的正交投影是 v1⋅v1v2⋅v1⋅v1,与 v1 正交的关于 v2 的分量是:
z2=v2−v1⋅v1v2⋅v1v1=−1/210−2−1/2101=−1/411/4 于是 {v1,z2} 是关于 λ=7 的特征空间的正交集.
将 v1 和 v2 规范化,我们得到关于 λ=7 特征子空间的单位正交基.
u1=1/201/2,u2=−1/184/181/18 关于 λ=2 对应的特征空间的单位正交基是
u3=∥2v3∥1⋅2v3=31−2−12=−2/3−1/32/3 由定理2, u3 与其他特征向量 u1 和 u2 正交, 因此 {u1,u2,u3} 是一个单位正交基. 令
P=[u1u2u3]=1/201/2−1/184/181/18−2/3−1/32/3,D=70007000−2 那么 P 将 A 正交对角化且 A=PDP−1.
二次型的线性替换
例 令 Q(x)=x12−8x1x2−5x22, 计算 Q(x) 在 x=[−31],[2−2] 和 [1−3] 处的值.
解
Q(−3,1)=(−3)2−8(−3)(1)−5(1)2=28Q(2,−2)=(2)2−8(2)(−2)−5(−2)2=16Q(1,−3)=(1)2−8(1)(−3)−5(−3)2=−20 例 求一个变量代换将上例中的二次型变为一个没有交叉项的二次型.
解:上例中二次型对应的矩阵是
A=[1−4−4−5] 第一步是将矩阵 A 正交对角化, A 的特征值是 λ=3 和 λ=−7, 相应的单位特征向量是:
λ=3:[2/5−1/5];λ=−7:[1/52/5] 这些特征向量自动正交(因为它们属于不同的特征值)且构成 R2 的一个单位正交基. 取
P=[2/5−1/51/52/5],D=[300−7] 那么 A=PDP−1, 且 D=P−1AP=P⊤AP, 像前面指出的那样, 一个适当的变换是
x=Py, 此处 x=[x1x2],y=[y1y2] 那么
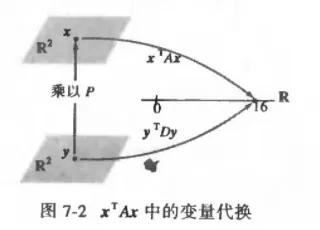
x12−8x1x2−5x22=x⊤Ax=(Py)⊤A(Py)=y⊤P⊤APy=y⊤Dy=3y12−7y22 为了说明本例中二次型相等的意义, 我们可以利用新二次型计算 Q(x) 在 x=(2,−2) 处的值,首先, 由于 x=Py, 我们得到
y=P−1x=P⊤x 则有
y=[2/51/5−1/52/5][2−2]=[6/5−2/5] 因此
3y12−7y22=3(6/5)2−7(−2/5)2=3(36/5)−7(4/5)=80/5=16 这就是例 3 中 Q(x) 在 x=(2,−2) 处的值, 见图 7-2.