3.8 推广与应用*
3.8.1 最小二乘问题的推广
正则化
在求解超定线性方程组时, 我们极小化 ∥Ax−b∥22 而对于欠定线性方程组, 由于解不唯一, 我们往往还需要极小化 ∥x∥22 两者合起来就是
x∈Rnmin21∥Ax−b∥22+2α∥x∥22,(3.31) 其中 α>0 是正则化参数. 对应的目标函数记为
J(x)=∥Ax−b∥22+α∥x∥22. 当 α>0 时, J(x) 是一个严格凸的二次函数, 因此存在唯一的最小值点. 令 J(x) 关于 x 的一阶导数为零, 则可得
(ATA+αI)x=ATb. 由于 ATA+αI 对称正定, 故非奇异. 所以问题 (3.30) 的唯一解为
x=(ATA+αI)−1ATb. 加权正则化
一类应用更广泛的问题是下面的加权正则化问题
x∈Rnmin21∥Ax−b∥22+2α∥Wx∥22,(3.32) 其中 α>0 是正则化参数, W∈Rm×n 是广义加权矩阵, 可以是非负对角矩阵, 对称正定矩阵,也可以是一般矩阵 (如一阶差分算子, 二阶差分算子等). 需要指出的是, W 不一定要求是方阵.经过类似的推导, 可知问题 (3.31) 的解满足
(ATA+αWTW)x=ATb. 如果 ATA+αWTW 非奇异, 则存在唯一解
x=(ATA+αWTW)−1ATb. 约束最小二乘问题
考虑带有约束的最小二乘问题
x∈Rnmin21∥Ax−b∥22(3.33) s . t .Bx=f 其中 Bx=f 是约束条件, B∈Rp×n 和 f∈Rp 都是给定的. 对应的 Lagrange 函数为
J(x)=21∥Ax−b∥22+λT(Bx−f). 分别对 x 和 λ 求一阶导数,并令其等于零,可得
[ATABBT0][xλ]=[ATbf]. 如果 ATA 非奇异, 且 B 行满秩, 则存在唯一解
λ=[B(ATA)−1BT]−1[B(ATA)−1ATb−f] x=(ATA)−1(ATb−BTλ). 3.8.2 最小二乘问题的应用
多项式数据拟合
最小二乘的一个重要应用就是低次多项式数据拟合: 已知平面上 n 个点 {(ti,fi)}i=1n , 寻找一个低次多项式来拟合这些数据.
设拟合多项式为
p(x)=a0+a1t+a2t2+⋯+amtm. 通常 m≪n . 将上述 n 个点 {(ti,fi)}i=1n 代入可得
11⋮1t1t2⋮tnt12t22⋮tn2………t1mt2m⋮tnmn×(m+1)a0a1⋮am=f1f2⋮fn 或 Ax=f
其中 A∈Rn×(m+1) , x=[a0,a1,…,am]⊤ . 由于 m≪n , 该方程组是超定的, 解通常是不存在的. 因此, 我们寻找一个近似解, 使得残量 ∥f−Ax∥2 最小, 即求解最小二乘问题
x∈Rm+1min∥f−Ax∥22 线性预测
预测一个时间序列的未来走向, 其中一个常用方法就是线性预测 (linear prediction). 假定一个时间序列在 tk 时刻的值 fk 线性依赖于其前 m 个时刻的值 fk−1,fk−2,…,fk−m , 即
fk=a1fk−1+a2fk−2+⋯+amfk−m.(3.34) 现在已经测得该时间序列的前 n 个值 fi,i=0,1,2,…,n−1 , 如何预测其未来的取值. 这里 n≫m . 将现有的数据代入关系式 (3.33) 可得
fm−1fm⋮fn−2fm−2fm−1⋮fn−3fm−3fm−2⋮fn−4………f0f1⋮fn−m−1(n−m)×ma1a2⋮am=fmfm+1⋮fn−1或Ax=f, 其中 A∈R(n−m)×m,x=[a1,a2,…,am]⊤ . 这也是一个超定问题, 其解也是通过求解下面的最小二乘问题来获取
x∈Rmmin∥f−Ax∥22 信号恢复
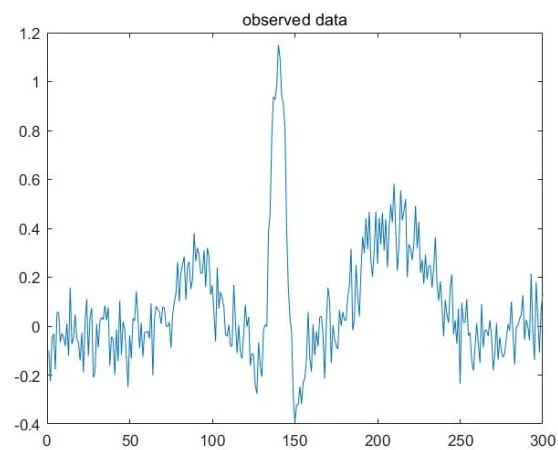
在获取数字信号时, 由于各种各样的原因, 最后得到的信号总会带有一定的噪声, 即
b=x+η, 其中 x 是真实的信号, b 是观察到的信号, η 是噪声.
去噪是数字信号和图像处理中的一个基本问题, 其中一个有效方法就是加权最小二乘法, 即
xmin21∥x−b∥22+21α∥Dx∥22, 其中 D 是离散的二阶导算子或TV算子
例3.8 数字信号去噪
(LS_denoise.m)

图像恢复
除了带噪声以外, 在获取数字图像时也经常会由于各种原因 (设备仪器, 拍摄环境等) 导致图像模糊. 通常数字图像的获取模型为
f=B(x)+η, 其中 x 是真实图像, f 是观察到的图像, B(⋅) 是卷积算子 (代表模糊机制), η 是噪声.
由于问题本身是不适定的, 因此求解时需要进行正则化, 常用的模型有 Tikhonov 正则化模型:
min∥B(x)−f∥22+μ2∥x∥22 或加权正则化模型:
min∥B(x)−f∥22+μ2∥Dx∥22, 其中 D 是广义加权矩阵,可以是非负对角矩阵或TV算子等
例3.9 数字图像去噪和去模糊
(a)
(b)
(a)

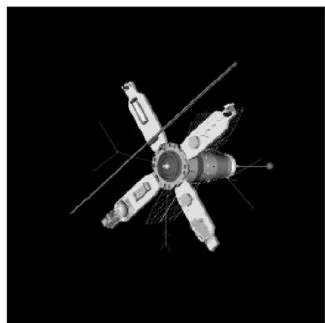
(a) 真实图像
(b)

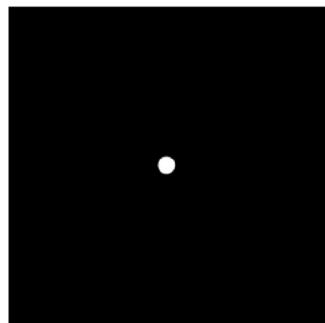
(b) 模糊机制 (out-of-focus)
(c)
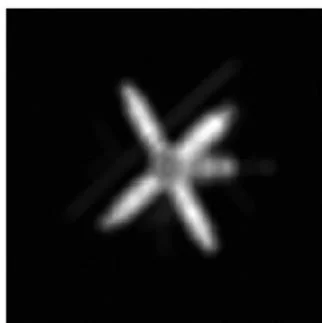
(a) 获取到的图像 (带有噪声和模糊)
(b) 恢复后的图像 (基于 Tikhonov 正则化模型)
(c) 恢复后的图像 (基于加权正则化模型)