特征值之和与特征值之极
矩阵A的特征有2个重要性质:
(1)所有特征值的和等于主对角线元素之和,记做tr(A)。即
λ1+λ2+...λn=a11+a22+...ann
(2)所有特征值的乘积等于矩阵的行列式的值。即
λ1λ2...λn=∣A∣
例 设矩阵 A=136−3a−633b 有特征值 λ1=−2,λ2=4 , λ3 ,求 a,b 的值及 λ3 .
解: 由
∣λ1E−A∣∣λ2E−A∣=−3−3−63−2−a6−3−3−2−b=3(5+a)(4−b)=0,=3−3−634−a6−3−34−b=3[72−(7−a)(2+b)]=0, 得 a=−5,b=4 .
现在 a,b已经知道,表示主对角线元素都已经知道了,又因为知道了2个特征值,所以,要求充分利用特征值的第一个性质,特征值之和等于主对角线元素之和。
又由 tr(A)=1+a+b=0 及 tr(A)=λ1+λ2+λ3 ,得 λ1+λ2+λ3=0 ,故 λ3=−2 .
矩阵的迹
一个 n×n 矩阵A中(即为一个方阵),主对角线上各个元素的总和被称为矩阵的迹,记作: tr(A)
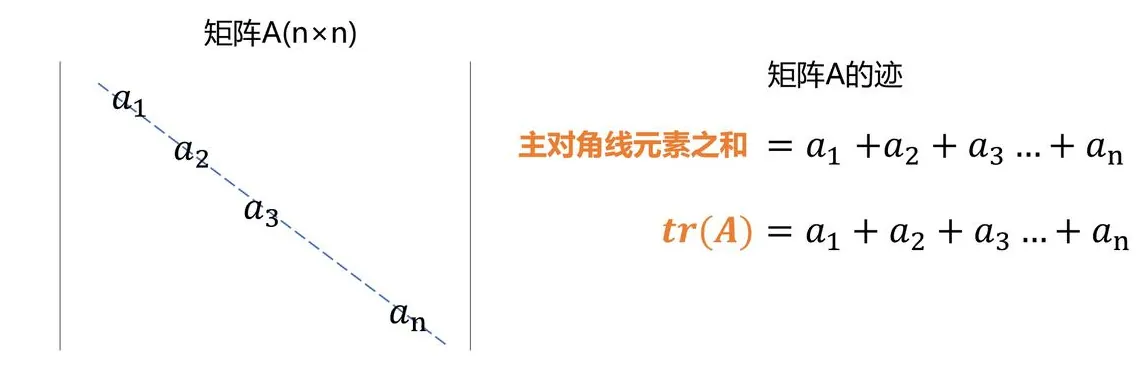
特征值之和
矩阵A的迹=矩阵A的所有特征值之和
即:方阵主对角线元素之和 = 方阵的全部特征值之和
tr(A)=λ1+λ2+…+λn 特征值之积
矩阵 A 的行列式 = 矩阵 A 的所有特征值的之积。
即:方阵的行列式 = 方阵的全部特征值之积
∣A∣=λ1×λ2×…×λn 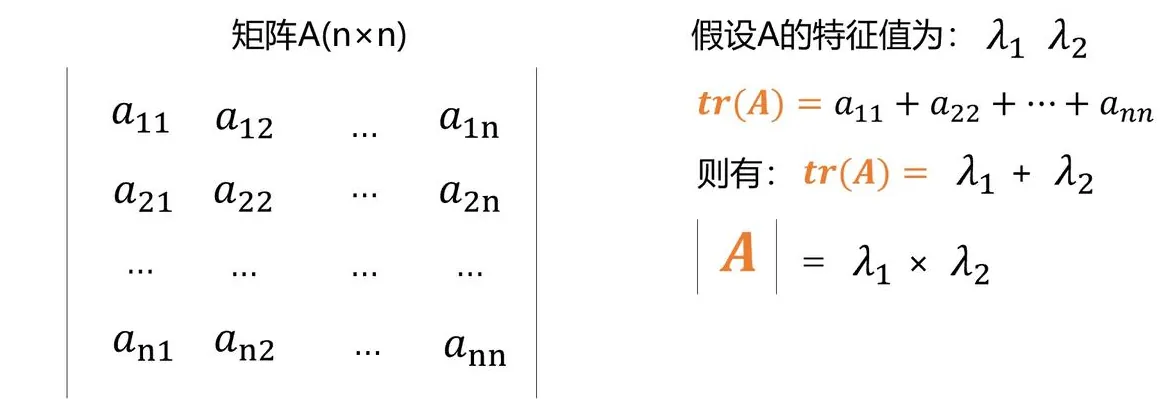
矩阵的迹的意义-相似不变量
迹是相似不变量。如果矩阵 A 和 B 相似(即存在可逆矩阵 P 使得 B=P−1AP),那么 tr(A)=tr(B) 。
这意味着迹描述的是线性变换本身固有的、独立于所选择基底的属性。无论你用什么坐标系来描述同一个线性变换,它的迹是不变的。
矩阵的迹反应的是一个图像缩放的比例。不管坐标系怎么变化,变化的总步骤是固定的。
例如,要把 1∗1 的正方形变成 2∗3 的矩形,可以长扩大2倍,宽再扩大3倍。 也可以长扩大3倍,宽再扩大2倍,不管怎么操作,这个2和3都是需要的,而且其和是个定值。
通俗理解,假设 A以 3m/s 向东行驶,B以 5m/s 向东形式,那么 ,A,B的速度差为 2m/s ,而这个速度差,不论你以地面为参照物(基坐标),还是以汽车为参照物(新基坐标),这个差别是不变的。他反应了物体本身固有属性。
延伸阅读:时空中的不变量
在爱因斯坦的时空观理论中,一个事件的时刻 T 及其三维笛卡儿坐标 (X,Y,Z) 合成了四维时空中的单个四维向量( T,X,Y,Z )。当然,这个向量的空间成分没有绝对的意义:对于空间中的同一个点,旋转坐标轴就会给出不同的坐标 (X,Y,Z) .但是若令两个人各取不同的坐标轴,他们仍然会得到同样的 X2+Y2+Z2=X2+Y2+Z2 ,因为这个公共值表示的是由原点到此点距离的平方.
与此形成对照的是:我们习惯上总以为时间成分 T 确有绝对的意义.然而,爱因斯坦的理论一一它已经由无数的实验所证实——却告诉我们并非如此。如果两个观察者(设在某一瞬间处于同一场所)以匀速做相对运动,则他们对事件是否同时发生会有不同意见,即是说他们不会有同样的同时性概念。此外,他们也不会有 (X2+Y2+Z2) 的相同值——这就是著名的洛仑兹收缩,对于 T2 之值同样也不会取得一致,这就是洛仑兹的时钟变慢.那么时-空是否还有绝对的方面使得互相作匀速相对运动的这两个观察者必须取得一致呢?有的:选一个方便的单位制使光速在其中为 1 ,爱因斯坦发现,这两个观察者对下式的值必然一致:
T2−(X2+Y2+Z2)=T2−(X2+Y2+Z2) 洛仑兹变换 L 就是时-空的一种线性变换(表示为 4×4 矩阵),它把一个观察者对某一事件的描述( T,X,Y,Z )变为另一观察者对同一事件的描述( T,X,Y,Z )。换一个说法, L 就是保持量 T2−(X2+Y2+Z2) 不变的线性变换,两个观察者所得到的此量之值必定相同.