0x21_树与图的遍历
0x21 树与图的遍历
树与图最常见的存储方式就是使用一个邻接表保存它们的边集。除非特殊声明,本书在接下来的各章节中默认,给定 个点的树或图时,其节点编号均为 ,无向图中的边看作成对出现的双向边,树看作一张具有 条边的无向图,它们的边都存储在一个邻接表中,邻接表以 head 数组为表头,使用 ver 和 edge 数组分别存储边的终点和权值,使用 next 数组模拟链表指针(就像我们在 0x13 节中讲解邻接表时所给出的代码那样)。
树与图的深度优先遍历,树的DFS序、深度和重心
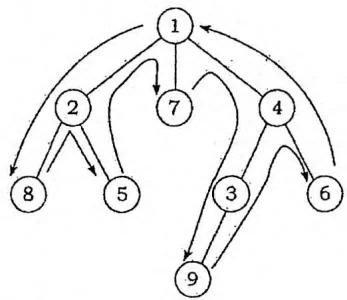
深度优先遍历,就是在每个点 上面对多条分支时,任意选一条边走下去,执行递归,直至回溯到点 后,再考虑走向其他的边,如右图所示。根据上面提到的存储方式,我们可以采用下面的代码,调用dfs(1),对一张图进行深度优先遍历。
void dfs(int x) {
v[x] = 1; // 记录点 $x$ 被访问过, $v$ 是 visit 的缩写
for (int i = head[x]; i; i = next[i]) {
int y = ver[i];
if (v[y]) continue; // 点 $y$ 已经被访问过了
dfs(y);
}
}这段代码访问每个点和每条边恰好1次(如果是无向边,正反向各访问1次),其时间复杂度为 ,其中 为边数。以这段代码为框架,我们可以统计许多关于树和图的基本信息。
时间戳
按照上述深度优先遍历的过程,按照每个节点第一次被访问 被赋值为1时)的顺序,依次给予这 个节点 的整数标记,这个标记就被称为时间戳,记为
例如,在本页的图中, , , , , , , , , 。
树的DFS序
一般来讲,我们在对树进行深度优先遍历时,对于每个节点,在刚进入递归后以及即将回溯前各记录一次该点的编号,最后产生的长度为 的节点序列就称为树的DFS序。
void dfs(int x) {
a[++m] = x; // a数组存储 DFS 序
v[x] = 1; // 记录点 x 被访问过
for (int i = head[x]; i; i = next[i]) {
int y = ver[i];
if (v[y]) continue;
dfs(y);
}
a[++m] = x;
}DFS 序的特点是:每个节点 的编号在序列中恰好出现两次。设这两次出现的位置为 与 ,那么闭区间 就是以 为根的子树的 DFS 序。这使我们在很多与树相关的问题中,可以通过 DFS 序把子树统计转化为序列上的区间统计。我们在后续的章节中会涉及此类题目。
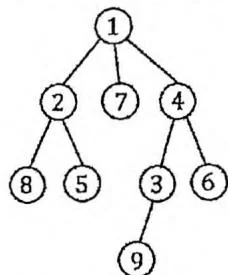
DFS序:1,2,8,8,5,5,2,7,7,4,3,9,9,3,6,6,4,1
子树2 子树7 子树4
另外,二叉树的先序、中序与后序遍历序列,也是通过深度优先遍历产生的,大多数程序设计入门级的书籍上都有详细讲解,在此就不再赘述。读者应该掌握这几种遍历,以及它们之间的联系和转化。
树的深度
树中各个节点的深度是一种自顶向下的统计信息。起初,我们已知根节点的深度为0。若节点 的深度为 ,则它的子节点 的深度就是 。在深度优先遍历的过程中结合自顶向下的递推,就可以求出每个节点的深度 。请读者尝试列举还有哪些信息一般是自顶向下进行统计的。
void dfs(int x) {$\begin{array}{l}\mathrm{v}[\mathrm{x}] = 1;\\ \mathrm{for~(int~i = ~head[x];~i;~i = ~next[i])~\{}\\ \mathrm{int~y = ~ver[i];}\\ \mathrm{if~(v[y])~continue;}\\ \mathrm{d[y] = d[x] + 1;~//~from~父~节点~x~到~子~节点~y~递推,~计算~深度}\\ \mathrm{dfs(y);}\\ \}}\\ \}} \end{array}$树的重心
当然,也有许多信息是自底向上进行统计的,比如以每个节点 为根的子树大小 。对于叶子节点,我们已知“以它为根的子树”大小为1。若节点 有 个子节点 ,并且以 为根的子树大小分别是 ,则以 为根的子树的大小就是 。请读者尝试列举还有哪些信息一般是自底向上进行统计的。
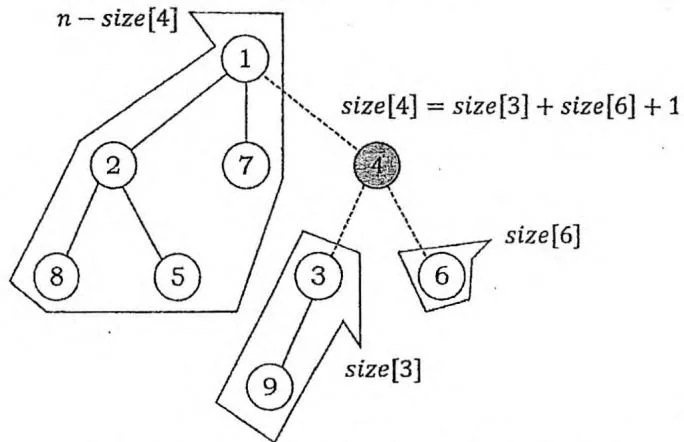
对于一个节点 ,如果我们把它从树中删除,那么原来的一棵树可能会分成若干个不相连的部分,其中每一部分都是一棵子树。设 max_part(x) 表示在删除节点 后产生的子树中,最大的一棵的大小。使 max_part 函数取到最小值的节点 就称为整棵树的重心。例如上图中的树的重心应该是节点 1。通过下面的代码,我们可以统计出 size 数组,并求出树的重心。
void dfs(int x) {
v[x] = 1; size[x] = 1; // 子树 $x$ 的大小
int max_part = 0; // 删掉 $x$ 后分成的最大子树的大小
for (int i = head[x]; i; i = next[i]) {
int y = ver[i];
if (v[y]) continue; // 点 $y$ 已经被访问过了dfs(y); size[x] += size[y]; //从子节点向父节点递推 max_part = max(max_part, size[y]); } max_part = max(max_part, n - size[x]); //n为整棵树的节点数目 if (max_part < ans) { ans = max_part; //全局变量ans记录重心对应的max_part值 pos = x; //全局变量pos记录了重心 }图的连通块划分
上面的代码每从 开始一次遍历,就会访问 能够到达的所有的点与边。因此,通过多次深度优先遍历,可以划分出一张无向图中的各个连通块①。同理,对一个森林进行深度优先遍历,可以划分出森林中的每棵树。如下面的代码所示,cnt 就是无向图包含的连通块的个数, 数组标记了每个点属于哪一个连通块。
void dfs(int x) {
v[x] = cnt;
for (int i = head[x]; i; i = next[i]) {
int y = ver[i];
if (v[y]) continue;
dfs(y);
}
}
for (int i = 1; i <= n; i++) // 在 int main() 中
if (!v[i]) {
cnt++;
dfs(i);
}树与图的广度优先遍历,拓扑排序
树与图的广度优先遍历需要使用一个队列来实现。起初,队列中仅包含一个起点(例如1号节点)。在广度优先遍历的过程中,我们不断从队头取出一个节点 ,对于
面对的多条分支,把沿着每条分支到达的下一个节点(如果尚未访问过)插入队尾。重复执行上述过程直到队列为空。
我们可以采用下面的代码对一张图进行广度优先遍历(关于代码中的 STL queue, 参见 0x71 节)。
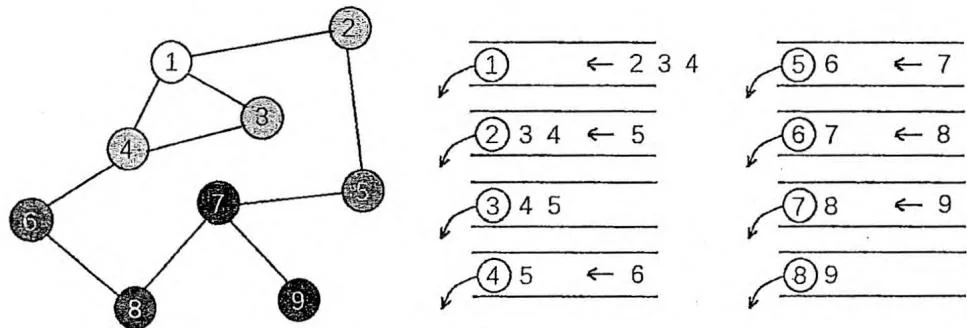
void bfs(){ memset(d,0,sizeof(d)); queue<int>q; q.push(1);d[1] = 1; while (q.size() > 0){ int $\mathbf{x} =$ q.front();q.pop(); for (int i = head[x]; i; i = next[i]) { int y $=$ ver[i]; if (d[y]) continue; d[y] $=$ d[x] + 1; q.push(y); } }在上面的代码中,我们在广度优先遍历的过程中顺便求出了一个 数组。对于一棵树来讲, 就是点 在树中的深度。对于一张图来讲, 被称为点 的层次(从起点1走到点 需要经过的最少点数)。从代码和示意图中我们可以发现,广度优先遍历是一种按照层次顺序进行访问的方法,它具有如下两个重要性质:
在访问完所有的第 层节点后,才会开始访问第 层节点。
任意时刻,队列中至多有两个层次的节点。若其中一部分节点属于第 层,则另一部分节点属于第 层,并且所有第 层节点排在第 层节点之前。也就是说,广度优先遍历队列中的元素关于层次满足“两段性”和“单调性”。
这两条性质是所有广度优先思想的基础,请读者务必牢记,我们在0x26节的“广搜变形”中会再次提及并探讨。与深度优先遍历一样,上面这段代码的时间复杂度也是 。
拓扑排序
给定一张有向无环图①,若一个由图中所有点构成的序列 满足:对于图中的每条边 , 在 中都出现在 之前,则称 是该有向无环图顶点的一个拓扑序。求解序列 的过程就称为拓扑排序。
拓扑排序过程的思想非常简单,我们只需要不断选择图中入度为0的节点 ,然后把 连向的点的入度减1。我们可以结合广度优先遍历的框架来高效地实现这个过程:
建立空的拓扑序列 。
预处理出所有点的入度 ,起初把所有入度为 0 的点入队。
3.取出队头节点 ,把 加入拓扑序列 的末尾。对于从 出发的每条边 ,把 减 1。若被减为 0,则把 入队。
重复第 步直到队列为空,此时 即为所求。
拓扑排序可以判定有向图中是否存在环。我们可以对任意有向图执行上述过程,在完成后检查 序列的长度。若 序列的长度小于图中点的数量,则说明某些节点未被遍历,进而说明图中存在环。读者可以参考下面的程序,画图模拟拓扑排序算法。
void add(int x, int y) { // 在邻接表中添加一条有向边
ver[++tot] = y, next[tot] = head[x], head[x] = tot;
deg[y]++;
}
void topsort() { // 拓扑排序
queue<int> q;
for (int i = 1; i <= n; i++)
if (deg[i] == 0) q.push(i);
while (q.size()) {
int x = q.front(); q.pop();
a[++cnt] = x;
for (int i = head[x]; i; i = next[i]) {
int y = ver[i];
}
}
}
};if(--deg[y] $\equiv = 0$ )q.push(y);
}
}
}
int main() { cin >> n >> m; //点数、边数 for (int i $= 1$ ;i $\Leftarrow$ m;i++) { int x,y; scanf("%d%d",&x,&y); add(x,y); } topsort(); for (int i $= 1$ ;i $\Leftarrow$ cnt; i++) printf("%d ",a[i]); cout << endl;
}【例题】可达性统计
给定一张 个点 条边的有向无环图,分别统计从每个点出发能够到达的点的数量。 。
设从点 出发能够到达的点构成的集合是 ,则显然有:
也就是说,从 出发能够到达的点,是从“ 的各个后继节点 ”出发能够到达的点的并集,再加上点 自身。所以,在计算出一个点的所有后继节点的 值之后,就可以计算出该点的 值。这启发我们先用拓扑排序算法求出一个拓扑序,然后按照拓扑序的倒序进行计算——因为在拓扑序中,对任意的一条边 , 都排在 之前。
回想起在第 节中学到的状态压缩方法,我们可以使用一个 位二进制数存储每个 ,其中第 位是1表示 能到 ,0表示不能到 。这样一来,对若干个集合求并,就相当于对若干个 位二进制数做“按位或”运算。最后,每个 中1的个数就是从 出发能够到达的节点数量。
这个 位二进制数可以压缩成 个无符号32位整数 unsigned int 进行存储,更简便的方法是直接使用 STL 中为我们提供的 bitset(参见第 0x71 节),bitset 支持我们上述所需的所有运算。该拓扑排序+状态压缩算法花费的时间规模约为
,所需空间大小约为 字节。