矩阵与对角形相似
在 特征值的几何意义 里说过,矩阵乘以一个向量,即Aα 通常有两种理解:
(1)可以看成矩阵A作用在向量 α 上,这使得 α 发生了旋转和缩放。
(2)把矩阵看成一个坐标系,α是该坐标系里的一个向量。
在理解特征值与特征向量或矩阵相似时,有时候这2个概念会轮流切换。这个观点就像对物理中光的理解。物理课里,光有反射和衍射。当遇到反射时我们就用“粒子说”,把光子想象一个个小球进行理解。 当遇到干涉时,我们就使用“波动说”,把光子想象为波动,详见 高中物理
对于矩阵和向量相乘(甚至矩阵和矩阵相乘),为了方便理解,本站给出了上面两种理解方式,这种理解到底是不是最优的,需要读者自行判断,或者您也可以由自己独特的见解。事实上,在《线性代数》数学这门课上,仅从数学的角度,他是不考虑意义的,比如特征值,数学教材就直接定义Aα=λα ,此时λ 就称作特征值,然后使用特征多项式求解,就完了。就像最简单的数字“1”,1就是1,1+1=2没什么好解释的,然而,为了理解他,我们会说,你有1个苹果,又拿了1个苹果,那么一共有2个苹果。这种人为的给数学赋予实际意义在帮助理解的同时,也会差生不同的解读,所以,就矩阵相似,读者也可以自己思考有没有更好的理解意义。
矩阵相似有4层理解:
第一层: A∼B ,即矩阵P−1AP=B
第二层: A∼Λ ,即矩阵P−1AP=Λ
第三层: A∼Λ 且 A=AT ,即矩阵A是对称矩阵,此时他相似对角形。可以看到,第三层是在第二层的基础上,进一步要求提高对称矩阵
第四层:在第三层的基础上,如果又满足 ATA=E 则称呼为正交变换,即A是对称矩阵,他的行列式的值为±1.
 {width=400px}
{width=400px}
第一层:矩阵相似
A和B相似,这里的2个矩阵相当于2个参照物,或者更通俗的理解是2个小孩看一张图片,2个矩阵相当于2个小孩,在这种情况下要求最宽松。
 {width=400px}
{width=400px}
第二层:矩阵和对角形相似
矩阵A和对角形Λ相似,相当于一个小孩可以找到一个“正面视角”查看图片。
 {width=400px}
{width=400px}
第三层:对称矩阵和对角形相似
不是每个矩阵A都可以和对角形Λ相似,但是我们发现如果A是对称矩阵,则一定和对角形相似
 {width=300px}
{width=300px}
第四层:对称矩阵和正交矩阵相似
如果A是对称矩阵且A离物体的行列式的值为1或者−1,这种视角是最棒的,因为此时看图片不失真。我们把这种矩阵称作“正交矩阵”,使用正交矩阵进行的变换,叫做正交变换。
 {width=400px}
{width=400px}
为什么我们要花大力气找到正交变换?一句话:正交变换不改变图形的性质。
在正交变换里,会有一个典型例题,详见 正交变换
一个空间里有2个向量,使用正交变换时,不改变着2个向量的夹角和长度,如下,
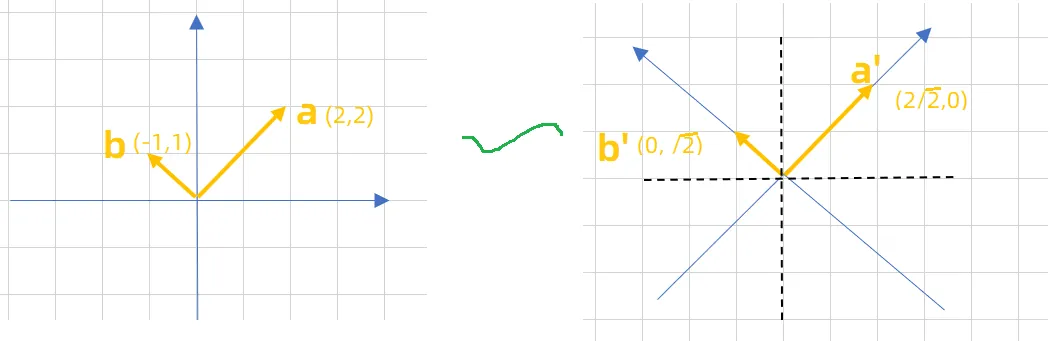
现在对上面进一步抽象,上面是2个向量,一个椭圆可以看成无数个向量组成的。假设有一个椭圆,在矩阵A表示下是斜椭圆,通过使用正交变换,就可以把他“扶正”,详见 特征值与特征向量
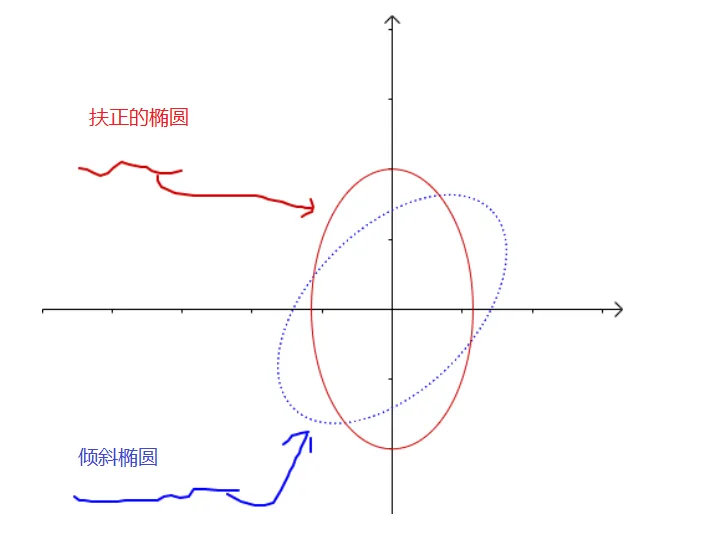 {width=400px}
{width=400px}
哪些情况下矩阵可以对角化?
为方便理解,这里仅以三阶矩阵为例。
所谓矩阵可以对角化其实给你一个矩阵能找到一个“三维的空间直角坐标系”,这里的坐标单位分别是a,b,c (如下示意)
矩阵可对角化包含了2个硬性要求:
(1)原矩阵可以张成三维空间。
(2)新张成的三维空间必须能够互相垂直。
a000b000c 情况一: 矩阵有3个线性无关的特征向量。
下面用例题进行了演示
例 设矩阵A=−20−4121103求他的特征与特征向量
解 : 具体解法请参考 矩阵对角化 里的例1。
我们已经求的 A 的特征值为 λ1=−1,λ2=λ3=2 .
和对应的的特征向量
\begin{aligned}
& p _1=\left(\begin{array}{l}
1 \\
0 \\
1
\end{array}\right)
,
& p_2=\left(\begin{array}{L}
0 \\
1 \\
-1
\end{array}\right)
,
& p_3=\left(\begin{array}{l}
1 \\
0 \\
4
\end{array}\right)
\end{aligned}
现在想想一下你在三维空间里,原坐标系是
-2 & 1 & 1 \\
0 & 2 & 0 \\
-4 & 1 & 3
\end{array}\right)
通过特征值和特征向量,我们找到了一个对角矩阵
1 & 0 & 1 \\
0 & 1 & 0 \\
1 & -1 & 4
\end{array}\right)
, 在Λ的空间里,因为 λ1=−1 所以,沿x方向方向相反,而 λ2=2,λ3=2, 所以,沿着y,z方向,进行了拉伸,参考下图。
下图右图小男孩看起来就漂亮多了
所以,矩阵相可对角化可以理解为,通过矩阵A观察一个几何体,我们可以找到一个三维对角形坐标系。在这个坐标系里,每个坐标轴上的特征值对应相应坐标系上放大或者缩小的倍数,在这个坐标系里,看到的物体更简洁、明了
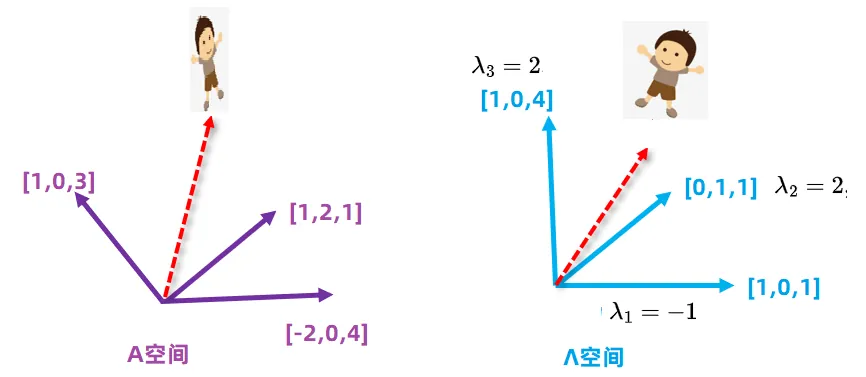
从上图可以看到矩阵A3个列向量被映射为对角形矩阵3个对应坐标系,在对角线视角下观察几何体,几何体更简洁。
推理有3个不同的特征值。
我们可以这么理解,矩阵的每一列被映射为对角形的每一列,特征值代表映射后缩放的倍数,如果特征值不同,根据特征值,就很容易知道矩阵A的哪一列对应对角形的哪一列,所以可以对角化。
如果把特征值比喻三把不同的钥匙,把特征向量比喻为3个不同的锁,那么因为每把钥匙不同,自然就能找到对用的不同的3吧
 {widht=300px}
{widht=300px}
情况三:对称矩阵可以对角化。
我们知道对于一个方阵,他本质是一个二维表格,矩阵对角化就是对矩阵进行缩放,而如果是对称矩阵,相当于二维表格在x,y同比放大或缩小相同的倍数,他保持了图形比例性不变。
情况四:特征值有重根,此时矩阵可能可以对角化也可能不能对角化。
如果矩阵A是三个向量α1,α2,α2,对角形是λ1,λ2,λ3,而特征值是1,2,2
如果映射正好是1对1,此时就可以对角化。
 {width=300px}
{width=300px}
α1→1∗λ1
α2→2∗λ2
α3→2∗λ3
这种情况就可以对角化。
而如果变成
α1→1∗λ1
α2→2∗λ3
α3→2∗λ3
可以看到,最终只找到了2个向量,无法张成三维空间,自然就无法对角化。
 {width=300px}
{width=300px}
哪些情况矩阵无法对角化?
情况1:矩阵A本身无法张成三维空间。这又分两种
(1)矩阵A三个向量成比例共线
取一个极端的例子:
A=111222333 这个A的三个分量都是(1,1,1) 是一个向量,他显然无法张成三维空间,自然不能其它他可以张成三维空间。
(2)矩阵A三个向量共面
此时自然也无法张成三维空间。
(3)对于上三角型矩阵,若主对角线上的元素全部一样,该上三角型矩阵不可对角化,
例如设矩阵 A=λ00…0a12λ0…0…………a1na2n…λ0 ,若矩阵相似于某个对角矩阵 B ,下面讨论对角矩阵 B 的对角元素到底如何.
首先容易得出 tr(A)=nλ0,∣A∣=(λ0)n ,由矩阵相似的性质可以得到 tr(B)=nλ0 , ∣B∣=(λ0)n ,而矩阵 B 为对角矩阵,所以 B=λ00…00λ0…0…………00…λ0=λ0E ,而这是不可能的,因为数量矩阵只能与自身相似,下面来说明一下这样的事实:
设 λ0E∼C ,即存在一个 n 阶可逆方阵 P ,使得 P−1λ0EP=C ,于是 C=λ0E ,证毕。
例如:100120210 可以与对角阵相似,但 100110211 不可以与对角阵相似.
另外,当矩阵作用向量时,有可能产生空间亏损,此时就无法对角化。更详细说明参考下一节
经典退化的例子
最典型的不可对角化矩阵是如下的 Jordan Block(若尔当块):
A=(2012) 让我们来分析它:
求特征值:
特征多项式为 det(A−λI)=det(2−λ012−λ)=(2−λ)2。
所以,它有一个特征值 λ=2,代数重数为 2。
求特征向量(几何重数):
解方程组 (A−2I)v=0:
(0010)(v1v2)=(00) 这个方程等价于 v2=0。所以,解向量具有形式 v=(k0)=k(10)。
分析重数:
代数重数:2
几何重数:基础解系只有一个向量 (10),所以几何重数为 1。
结论:由于几何重数 (1) < 代数重数 (2),这个矩阵无法找到两个线性无关的特征向量。它所有的特征向量都落在同一条直线 span{(10)} 上。我们无法用特征向量构成一个覆盖整个二维平面的基,因此它不能被对角化。
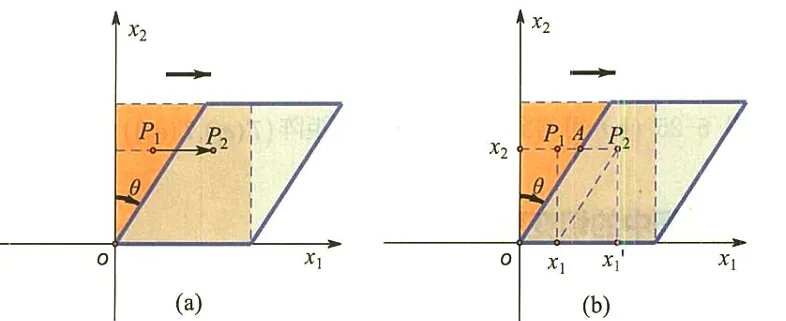
几何解释:这个矩阵代表的线性变换是一个“剪切”变换,详见剪切变换。它把所有向量都向 x-轴方向“推倒”。你可以想象,在整个平面上,只有一个方向(x-轴方向)的向量被纯粹地拉伸了。其他方向的向量不仅被拉伸,方向也发生了改变。因此,不存在一个由纯粹伸缩方向(特征方向)构成的坐标系。
4. 更深层的视角:若尔当标准型 (Jordan Normal Form)
对于那些不能对角化的矩阵,我们也有一个“最接近对角形”的标准形式,称为若尔当标准型。
可对角化矩阵的若尔当标准型就是一个纯粹的对角矩阵 Λ。
不可对角化矩阵的若尔当标准型是由 若尔当块 构成的分块对角矩阵。
在我们上面的例子 A=(2012) 中,它本身就是一个若尔当块。它已经是最简形式,无法再进一步对角化了。
若尔当块中的非对角线上那个“1”,就是阻碍对角化的“罪魁祸首”,它代表了特征向量短缺的程度,也引入了幂零的成分。
所以,当你问为什么有些矩阵不能对角化时,最核心的回答是:因为它们“缺”特征向量,无法形成一个完整的特征基,从而无法在新的坐标系下表现为纯粹的伸缩变换。 这些矩阵所代表的线性变换,其内在结构比简单的伸缩更为复杂,包含了“剪切”或“旋转”的成分,这些成分无法通过改变坐标系来消除。
总结
| 情况 | 特征向量情况 | 重数关系 | 能否对角化 |
|---|
| 可对角化 | 有 n 个线性无关的特征向量 | 每个特征值的 几何重数 = 代数重数 | 可以 |
| 不可对角化 | 线性无关的特征向量数量 少于 n | 至少有一个特征值的 几何重数 < 代数重数 | 不可以 |
所以,当你问为什么有些矩阵不能对角化时,最核心的回答是:因为它们“缺”特征向量,无法形成一个完整的特征基,从而无法在新的坐标系下表现为纯粹的伸缩变换。 这些矩阵所代表的线性变换,其内在结构比简单的伸缩更为复杂,包含了“剪切”或“旋转”的成分,这些成分无法通过改变坐标系来消除。
例题
n 阶矩阵 A 与对角矩阵相似的判定条件
| 条件 |结论 |
| -----| -----| ----|
| 充分条件 |有n个不同特征值 A 为实对称矩阵 |
| 必要条件 | 代数重根的数量等于 r(λE-A) |
| 充分必要条件 | A 有 n 个线性无关的特征向量 |
例下列矩阵中不能相似于对角矩阵的是( )
(A)100120a23
(B)11a120a03
(C)100120a02
(D)100120a22
解:
(1)对称矩阵一定可以对角化,所以排除B
(2)不同特征值一定可以对角化,所以排除A (对角形的对角线上的值为特征值,1,2,3 互不相同 ) 排除A
现在看C和D
对于C
100120a02−2E=−100100a003−r(C−2E)=2 有2个线性无关的特征向量,可以对角化。
对于D
100120a22−2E=−100100a203−r(D−2E)=1 有1个线性无关的特征向量,可以对角化。