4._线性映射的意义
线性映射的几何意义
初等线性函数 和高等线性函数 的表达式一致, 因此线性函数的概念形式上是统一的。这种统一在数学的实质意义上也是一致的, 就是函数的 “线性”,实质上就是指变量之间的 “线性关系”。
我们再来回味一下这句关于线性函数中心性质的话: 线性组合的函数, 等于函数的线性组合。 详细说来就是, 当自变量从 变换为它自身的线性组合 时, 其函数也从 变换为函数的线性组合 。因为函数的本意是因变量与自变量之间的对应关系,所以 “线性” 的本质就是因变量与自变量之间始终保持组合形式不变的一种对应关系, 我们把这类特殊的对应关系称之为 “线性关系”。因此我们所说的 “线性”, 实质上就是指变量之间的 “线性关系”。
实际上, 我们可以引入一种运动的思想, 把函数看成一种变换, 一种映射, 一种从自变量的集合对应变换到因变量的集合的瞬间过程。
这正是线性代数的中心思想之一。 对于初等的线性函数 而言; 我们需要改变中学老师谆谆教导。中学老师说,线性函数的几何图形是所有满足关系式 的点 所累积起来的图形。这个静态的图形概念需要改造改造。要在这里加入变换或映射的动作 (注意: 是动作, 一个瞬时的变化动作, 只有开始和结果), 并突出表达这种变换和投射的关系, 我们把表达式
改写成
。
其中 表示为一个从自变量数的集合 到因变量数的集合 的映射, 表示两个集合里的自变量 到因变量 之间具体的对应变换关系。
下面来看一个映射的集合示意图。图 1-9 给出了一元线性齐次函数 当 取不同的数时的映射对应关系。在三个分图中, 有一个共性就是元素 0 必然映射到元素 0 。
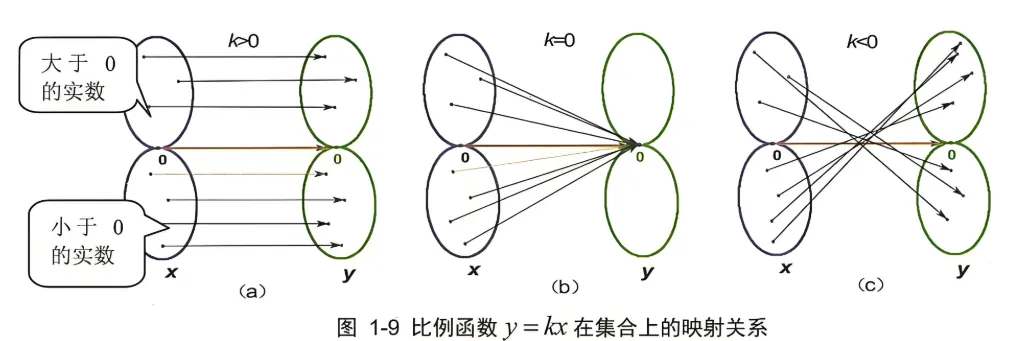
在集合上建立坐标系, 用坐标系里的点表示集合里的元素, 就可以把集合上的映射关系几何化了。
一维函数
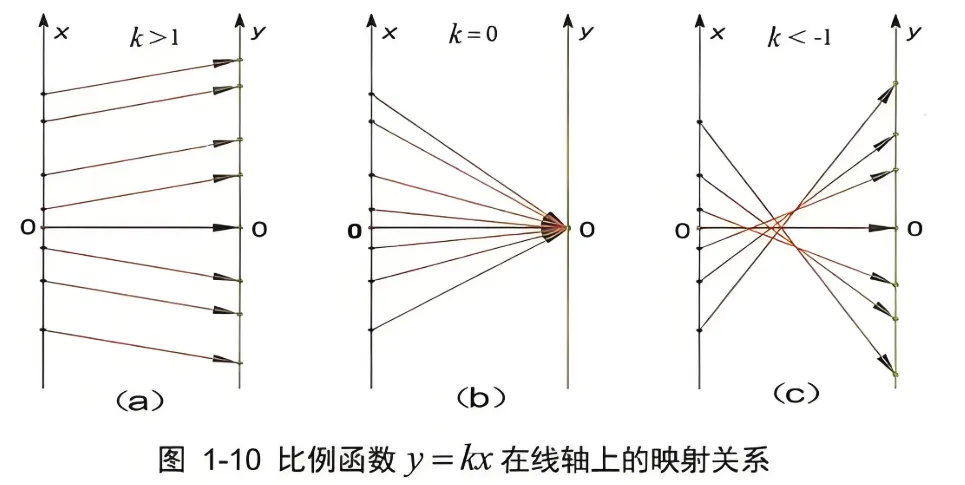
对于一元线性齐次函数 , 集合 和集合 都是实数。大家知道, 一个实数域可以用一根坐标轴来表示。因此集合 的坐标系就是一根线轴, 写为 轴; 集合 的坐标系也是一根轴, 写为 轴。这样, 我们就可以用坐标轴上点之间的映射来替代上图集合的映射表示法(见图 1-10)。
 {width=600px}
{width=600px}
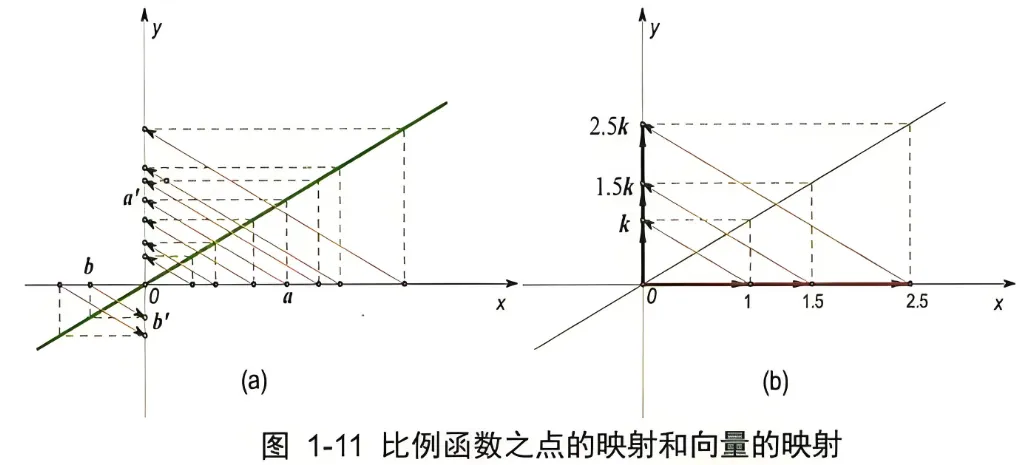
如果把两个坐标轴的原点进行重合 (因为 0 元素必然映射到 0 元素), 再把两个坐标轴的夹角调整到 角, 就可得到笛卡尔平面坐标系 (线性代数中讲的线性空间坐标系的坐标轴可以是任意非零的夹角)。把 用带箭头的线段连接起来, 如图 1-11 所示 (图中只画出了 的映射情况)。
 {width=600px}
{width=600px}
如图 1-11 (a) 所示, 轴上的点 和 等分别映射到 轴上的点 和 等等。过一三象限的直线就是所谓的一元齐次函数 的图形, 它是由 值确定的; 就像平行光线通过平面镜进行反射一样, 元素通过直线完成了映射。显然, 这是点到点的映射。而且, 不同的比率 值确定了一个不同的映射关系。
如果把点 和 分别与原点 0 连起来, 就会得到线段 。于是线段 映射到线段 , 线段 映射到线段 。
到这里我们有了一个暂时的总结: 线性映射就是把线段映射到线段 (这里, 映射终于和 “线” 扯上关系了)。如果我们把线段改称为向量的话, 这个总结就是:线性映射就是把向量映射成向量 (见图 1-11(b) )。线性映射把向量变成另外一个向量, 或者说把 “线”变成“线”,因此得名。
当然, 这个线性映射也满足线性的可加性和比例性的性质: 可加性就是 轴上的两向量的和映射得到的 轴向量等于两个 轴向量分别映射得到的 轴向量的和, 比例性就是 轴向量的倍数映射得到的 轴向量等于 轴向量映射的 轴向量的倍数 (见图 1-11(b))。用一般的数学表达式来描述线性映射的定义就是:
其中, 是映射运算, 是任意两个向量。
线性算子
你看这里, 本来表示一种线性映射的动作关系 (或函数关系), 但在上式中就像一个实数或变量一样参与运算。如 , 就像乘法对加法的分配律一样展开运算,因此 在这里也叫线性算子。具体的算子有微分算子、积分算子、拉普拉斯算子等。
其实在中学阶段,我们也学过函数的动态映射。传统的 当 取一个值,会有一个 和他对应,这种映射是静态的,因此在物理学里,通常使用,即 这种写法就表示了一种动态,在时刻,与是的关系,而在时刻,与是会是 的关系。 自变量从 到 的改变反应的就是一种动态变化思维。
二维函数
对于高等的线性函数 而言也有同样的结论, 我们把此表达式改写成
其中 的形式表示一个从自变向量的集合 到因变向量的集合 的映射。为了方便看到 的几何解释, 我们看看二维线性函数的坐标式:
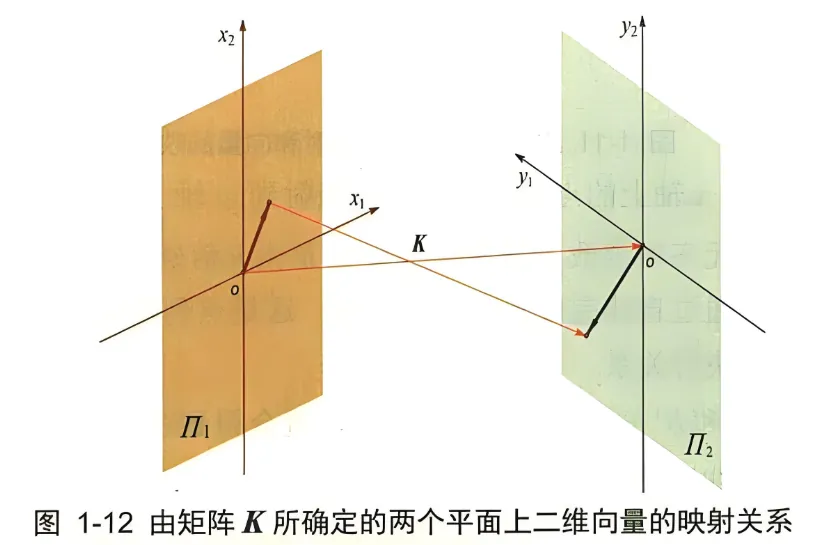
下面给出一般情况下的映射图像。 因为向量 和 都是二维向量, 所有任意的向量 的集合将构成平面 (见图 1-12),在平面 上构建二维坐标系 ; 同理, 所有任意的向量 的集合构成平面 , 在平面 上也构建二维坐标系 。所以, 二维线性函数就构成了两个二维平面之间由矩阵 所确定的映射关系 (矩阵是二维的比率)。
 {width=500px}
{width=500px}
平面 的原点 0 始终映射到另一个平面 的原点 0 , 这是线性映射的最基本要求。为了更紧密地观察映射之间的关系, 我们把平面 放平, 并使两个平面的原点 0 重合,就得到了一个由两个相交平面所构造的三维空间。
图 1-13 中, 把平面 上的向量 标注为 , 把平面 上的向量 标注为 (为了和坐标系的标注区别开来)。
 {width=600px}
{width=600px}
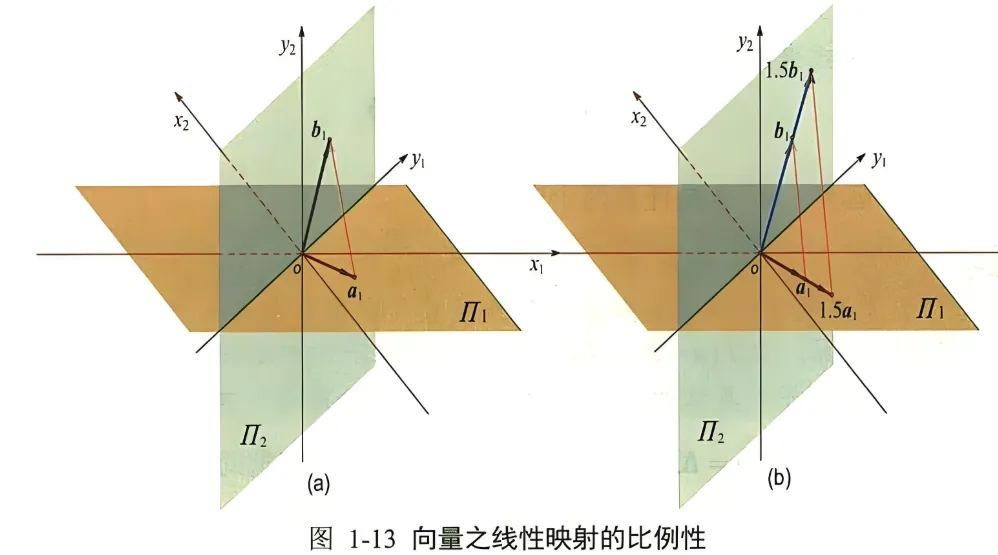
图 1-13(a)表示矩阵 把平面 上的一个向量 映射到平面 上的向量 , 也即有向线段映射为有向线段; 图 1-13(b)表示把一个向量 比例放大到 1.5 倍后被矩阵 映射到平面 上的向量 , 这满足线性映射的比例性。实际上, 不论矩阵 的元素是什么实数, 对于任意的矩阵 , 都有这个结论。因为
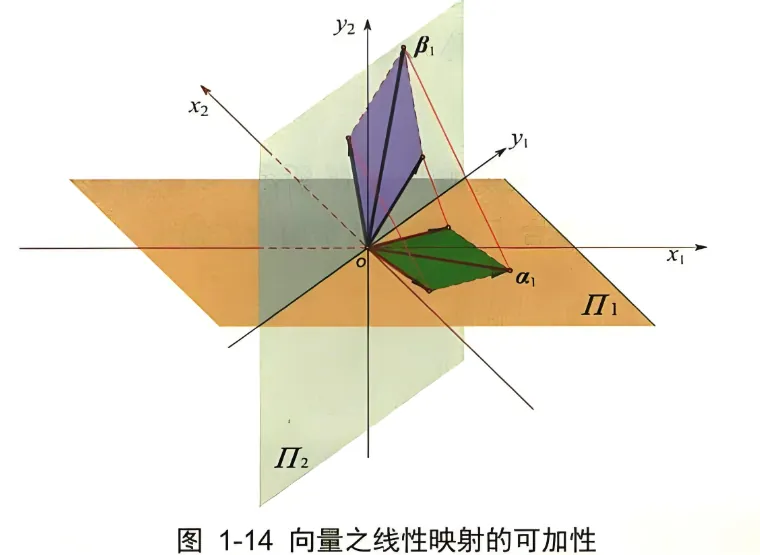
对于线性可加性, 我们也给出了图形。由图 1-14 看出, 一个平面上两个向量分别映射到另一个平面上的两个向量; 对应地, 它们的和 也作了同样的映射得到 。两个平面上的向量及其和各自构成一个平行四边形。
向量的平行四边形加法法则决定了一个平面上的平行四边形被矩阵映射成为另一个平面上的平行四边形, 这两个平行四边形可能全等, 可能相似, 大部分情况下既不全等也不相似。
 {width=600px}
{width=600px}
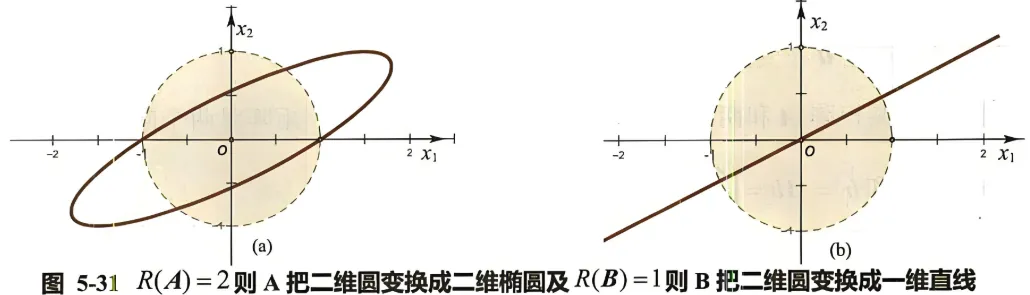
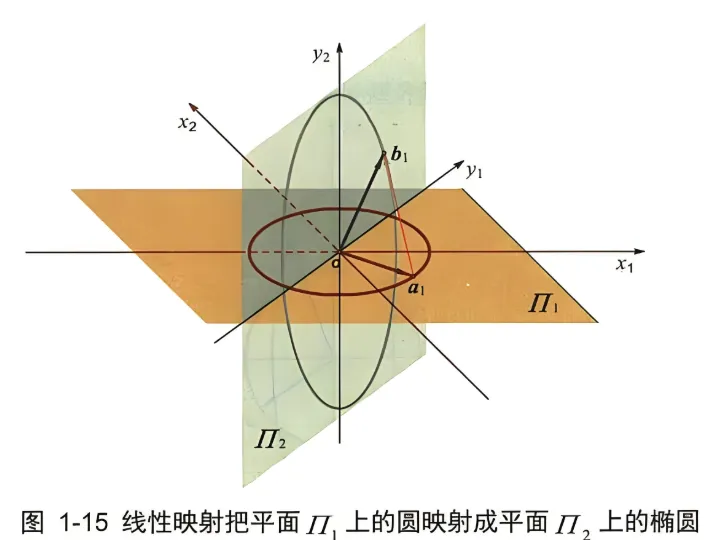
前面我们讨论了一个向量的映射或者是两个向量的和的映射情况。如果由无数等长而异向的向量构成的一个圆, 那么这个圆会由某一个矩阵映射成什么图形呢?
实际上, 可以被映射成圆、椭圆或者一根线段, 特殊情况下被映射成一个点(这个点必然落在原点上)。大多数情况是被映射成一个籿圆, 见图 1-15。图中圆上任意一个向量 映射成椭圆上的 。
 {width=600px}
{width=600px}
在这里, 把线性函数中 的变量 看成了一个图形 “圆” 而不只是一个向量,那么函数值 也就成了一个变换后的图形 “椭圆”。 把一个线性映射放到二维平面及三维空间中去考察, 细心揣摩其几何意义, 就不难理解概念的本质。
例如, 对于数乘变换 , 除了把 看做向量外, 我们可以把 看做一个几何图形(其实向量也是一个几何图形, 是一个简单的几何图形- - 有向线段, 细节请阅第二章内容), 在 时就是对 放大, 在 时就是对 缩小, 在 时就是把 反方向变化。
下图展示了一个圆被映射成了椭圆和直线的情形。