基变换的几何意义
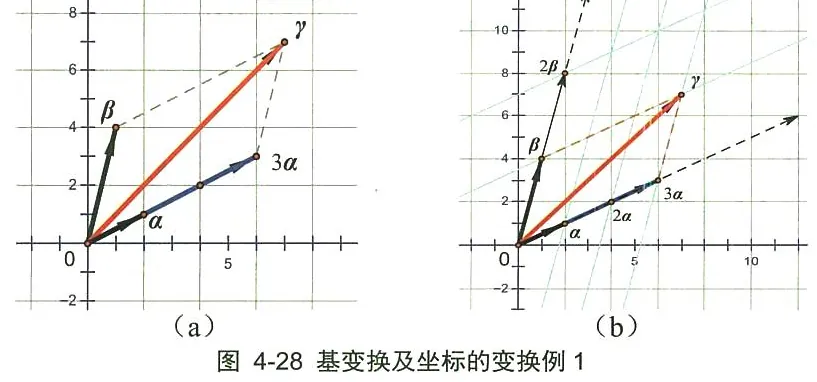
在直角平面坐标系(实际上为单位正交基 i,j )的空间中,有两个向量 α=(2,1) 和 β=(1,4) ,如图 4-28(a)所示。这两个向量线性无关(不成倍数关系),让它们构成平面空间一对新基。有另外一个向量 γ=(7,7), 则可以把它拼凑为这两个新基的线性组合(而且组合是唯一的):
γ=3α+β 那么, 向量 γ 相对于基 α,β 的坐标向量为 (3,1) 。
图 4-28 (a) 为原坐标系下的三个向量, 向量 γ 可以通过扩张 α 到三倍, 并与 β 合并而成;根据向量的平行四边形法则,图4-28(b)为重新划分的坐标网络(图中的倾斜线,画的不清楚,请仔细看),可以看出,向量 γ 在新网络下的坐标值确实是 (3,1) 。
基变换及坐标变换的公式
前面的讨论告诉我们,在一个 n 维的线性空间中,可以取不同的 n 元素无关向量组作为基。那么这个线性空间的任意两个基之间必有关联,这个关联是什么?还有,一个向量 a 在一个确定的基下有一个确定的坐标,这个向量在不同的基下有不同的坐标。第二个问题是,同一个向量,在任意两个基上的坐标之间有什么关联?
第一个问题:两个不同基的关系 一个 n 维线性空间 V,α1,α2,⋯,αn 和 β1,β2,⋯,βn 是 V 的两个基。先将 α1,α2,⋯,αn 作为空间的基, 那么向量组 β1,β2,⋯,βn 可以由 α1,α2,⋯,αn 线性表示为
β1=a11α1+a12α2+⋯+a1nαn=(α1,α2,⋯,αn)a11a12⋮a1n=(a11,a12,⋯,a1n)α1α2⋮αnβ2=a21α1+a22α2+⋯+a2nαn=(α1,α2,⋯,αn)a21a22⋮a2n=(a21,a22,⋯,a2n)α1α2⋮αn⋮βn=an1α1+an2α2+⋯+annαn=(α1,α2,⋯,αn)an1an2⋮ann=(an1,an2,⋯,ann)α1α2⋮αn 将以上 n 个表示式合并为 (注意:按列放)(β1,β2,⋯,βn)=(α1,α2,⋯,αn)a11a12⋮a1na21a22⋮a2n……⋮…an1an2⋮ann...(4.1) 因为 AX=B取转置后为XTAT=B 所以,对上面矩阵取转置得
β1β2⋮βn=a11a21⋮an1a12a22⋮an2…⋯…a1na2n⋮annα1α2⋮αn...(4.2) 式(4-1)或式(4-2)称为由基 α1,α2,⋯,αn 到基 β1,β2,⋯,βn 的基变换公式,其中,矩阵
P=a11a12⋮a1na21a22⋮a2n………an1an2⋮ann 或 P′=a11a21⋮an1a12a22⋮an2………a1na2n⋮ann 为A到B的过渡矩阵。
提示,上面采用抽象推导,也可以参考 向量组的等价 理解
注意两点:
(1) P 和 P′ 互为转置矩阵,这取决于你将基向量 αi 和 βi 看做是行向量还是列向量;
(2)过渡矩阵 P 的列向量和 P′ 的行向量分别是 β1,β2,⋯,βn 在基 α1,α2,⋯,αn 上的坐标 (按序排列成矩阵), 换句话说, 把 βi 在基 α1,α2,⋯,αn 上的坐标一列列地排列而成过渡矩阵 P 。
以上得到的矩阵 P 和 P′ 给出了第一个问题的答案, 就是线性空间的两个基之间是可以互相转换或变换的, 变换的矩阵称为过渡矩阵。
同一个向量不同坐标的关系
第二个问题:同一个向量,不同坐标的关系 下面我们看看一个向量的坐标的转换是什么?
设向量 a 在两个基 α1,α2,⋯,αn 和 β1,β2,⋯,βn 下的坐标分别是 (x1,x2,⋯,xn) 和 (x1′,x2′,⋯,xn′), 则向量 a 在基 α1,α2,⋯,αn 上表示为
a=(x1,x2,⋯,xn)a1a2⋮αn=(a1,α2,⋯,αn)x1x2⋮xn...(4.3) 同时, 向量 a 在基 β1,β2,⋯,βn 上表示为
a=(x1′,x2′,⋯,xn′)β1β2⋮βn=(β1,β2,⋯,βn)x1′x2⋮xn′...(4.4) 把前面的基变换公式(4-2)和公式(4-1)代入式(4-4)得到
a=(x1′,x2′,⋯,xn′)P′α1α2⋮αn=(α1,α2,⋯,αn)Px1′x2′⋮xn′...(4.5) 因为一个向量在同一个基下的坐标是唯一的, 所以, 对比式(4-5)和式(4-3)中的坐标部分,得到
(x1,x2,⋯,xn)=(x1′,x2′,⋯,xn′)P′...(4.6) 或
x1x2⋮xn=Px1′x2′⋮xn′...(4.7) 至此,我们得到了坐标转换的公式。
假设已知坐标 (x1′,x2′,⋯,xn′) ,直接使用式(4-7)即得到新基下的坐标 (x1,x2,⋯,xn) 。反之,如果已知 (x1,x2,⋯,xn) 求 (x1′,x2′,⋯,xn′) ,即公式
x1′x2′⋮xn′=P−1x1x2⋮xn...(4.8) 在上述推导中,一并给出了行向量和列向量的情形。不过大多教材只处理列向量的情形,我们以后也只处理列向量, 或把向量统统默认为列向量。
基过渡矩阵和向量转换矩阵请注意一个容易搞错的地方:在列向量的习惯下,由旧基矩阵计算得到新基矩阵的变换矩阵是基过渡矩阵或转换矩阵 P ,公式为式(4-1),右乘旧基矩阵;而任一个向量由其旧坐标计算新坐标的公式是式(4-8),其向量坐标的转换矩阵是 P−1 左乘向量,用的是基过渡矩阵的逆阵。
下面我们举例说明具体的基过渡矩阵和坐标转换计算。
如图 4-29 所示,二维平面空间的一组基为 a1、α2 (没有具体值),平面有一向量 a ,由图知 a=(−2,2)T 。我们再取一组基 β1、β2, 新基在原来基 α1 、 α2 上的坐标分别是 (−21,23)T, (−1,−1)T 。把它们按顺序排列起来,得到了由基 α1、α2 过渡到基 β1、β2 的过渡矩阵为
P=[−2123−1−1] 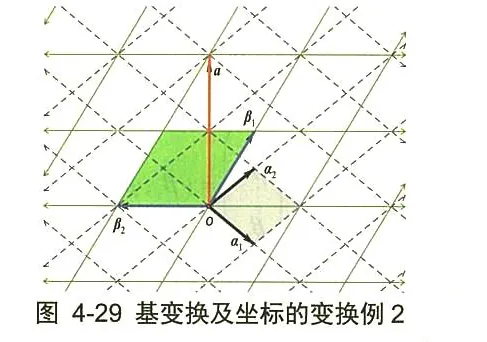
过渡矩阵也可以由列出的基的表示式方程组得到。把 β1=−21α1+23α2,β2=−α1−α2 按列向量排列即可析出过渡矩阵
(β1,β2)=(α1,α2)[−2123−1−1] 过渡矩阵对不对,我们验证一下。用过渡矩阵求向量 a=(−2,2)T 在新基 β1,β2 上的坐标,用坐标转换公式:
(x2′x1′)=P−1(x2x1)=[−2123−1−1]−1(2−2)=21[−1−231−21](2−2)=(12) 看看图 4-29, 向量 a 在基 β1、β2 的坐标网络中的坐标正是 (12) ,过渡矩阵和坐标转换公式得到验证。