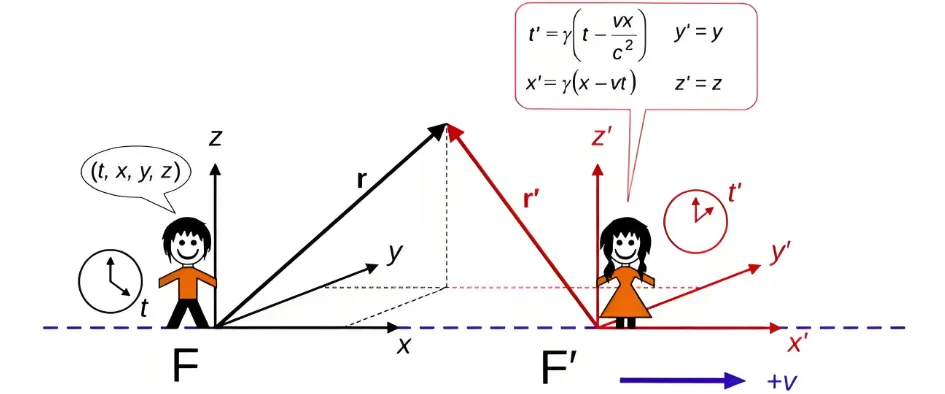
为什么会有基变换与坐标变换 对于基变换,最容易理解的是“火车模型”,想象火车以 100 m / s 100m/s 100 m / s 向东 行驶,火车里有一个水杯,A A A A A A 100 m / s 100m/s 100 m / s B B B A , B A,B A , B
进一步,如果地面的基准速度为0 m / s 0m/s 0 m / s 100 m / s 100m/s 100 m / s C C C v = 30 m / s v=30m/s v = 30 m / s v ′ = 100 − v = 70 m / s v'=100-v=70m/s v ′ = 100 − v = 70 m / s A A A 100 m / s 100m/s 100 m / s C C C 70 m / s 70m/s 70 m / s v x ′ = v x − v v_x'=v_x-v v x ′ = v x − v v v v
其实上面语境 有一个陷阱,当我们一开始说火车以100 m / s 100m/s 100 m / s B B B A A A 100 m / s 100m/s 100 m / s 向西 运动。 这就是运动的相对性。 详见伽利略变换与洛伦兹变换
基变换可以通俗理解就是高中物理课中说的“参照物”改变了,而坐标变化就是在参照物变了的情况下,对同一运动运动变化的转化
线性空间里的基变换 在一个有限维线性空间 V V V ε 1 , ε 2 , ⋯ , ε n \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n ε 1 , ε 2 , ⋯ , ε n V V V ε i 1 , ε i 2 , ⋯ , ε i n \varepsilon_{i_1}, \varepsilon_{i_2}, \cdots, \varepsilon_{i_n} ε i 1 , ε i 2 , ⋯ , ε i n V V V n n n α \alpha α K n K^n K n 找出 V V V .
注意:本节内容较为抽象,如果您理解有困难,
可以先阅读下一节 基变换的几何意义 然后再来阅读本文。
过渡矩阵 设在 n n n V V V
ε 1 , ε 2 , ⋯ , ε n , η 1 , η 2 , ⋯ , η n , \begin{aligned}
& \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n, \\
& \eta_1, \eta_2, \cdots, \eta_n,
\end{aligned} ε 1 , ε 2 , ⋯ , ε n , η 1 , η 2 , ⋯ , η n , 每个 η i \eta_i η i ε 1 , ε 2 , ⋯ , ε n \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n ε 1 , ε 2 , ⋯ , ε n
η 1 = t 11 ε 1 + t 21 ε 2 + ⋯ + t n 1 ε n , η 2 = t 12 ε 1 + t 22 ε 2 + ⋯ + t n 2 ε n , ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ η n = t 1 n ε 1 + t 2 n ε 2 + ⋯ + t n n ε n . \begin{aligned}
& \eta_1=t_{11} \varepsilon_1+t_{21} \varepsilon_2+\cdots+t_{n 1} \varepsilon_n, \\
& \eta_2=t_{12} \varepsilon_1+t_{22} \varepsilon_2+\cdots+t_{n 2} \varepsilon_n, \\
& \cdots \cdots \cdots \cdots \cdots \cdots \cdots \cdots \\
& \eta_n=t_{1 n} \varepsilon_1+t_{2 n} \varepsilon_2+\cdots+t_{n n} \varepsilon_n .
\end{aligned} η 1 = t 11 ε 1 + t 21 ε 2 + ⋯ + t n 1 ε n , η 2 = t 12 ε 1 + t 22 ε 2 + ⋯ + t n 2 ε n , ⋯⋯⋯⋯⋯⋯⋯⋯ η n = t 1 n ε 1 + t 2 n ε 2 + ⋯ + t nn ε n . 再度借助矩阵乘法法则,把上面的公式形式地写成
( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) [ t 11 t 12 ⋯ t 1 n t 21 t 22 ⋯ t 2 n ⋮ ⋮ ⋮ t n 1 t n 2 ⋯ t n n ] . \left(\eta_1, \eta_2, \cdots, \eta_n\right)=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right)\left[\begin{array}{cccc}
t_{11} & t_{12} & \cdots & t_{1 n} \\
t_{21} & t_{22} & \cdots & t_{2 n} \\
\vdots & \vdots & & \vdots \\
t_{n 1} & t_{n 2} & \cdots & t_{n n}
\end{array}\right] . ( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) t 11 t 21 ⋮ t n 1 t 12 t 22 ⋮ t n 2 ⋯ ⋯ ⋯ t 1 n t 2 n ⋮ t nn . 命
T = [ t 11 t 12 ⋯ t 1 n t 21 t 22 ⋯ t 2 n ⋮ ⋮ ⋮ t n 1 t n 2 ⋯ t n n ] . T=\left[\begin{array}{cccc}
t_{11} & t_{12} & \cdots & t_{1 n} \\
t_{21} & t_{22} & \cdots & t_{2 n} \\
\vdots & \vdots & & \vdots \\
t_{n 1} & t_{n 2} & \cdots & t_{n n}
\end{array}\right] . T = t 11 t 21 ⋮ t n 1 t 12 t 22 ⋮ t n 2 ⋯ ⋯ ⋯ t 1 n t 2 n ⋮ t nn . 称 T T T ε 1 , ε 2 , ⋯ , ε n \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n ε 1 , ε 2 , ⋯ , ε n η 1 , η 2 , ⋯ , η n \eta_1, \eta_2, \cdots, \eta_n η 1 , η 2 , ⋯ , η n 过渡矩阵 。
基变换公式 在上面推导过渡矩阵的过程中,得到了一个公式
( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T . . . ( 基变换公式 ) \boxed{
\left(\eta_1, \eta_2, \cdots, \eta_n\right)=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) T ...(\text{基变换公式})
} ( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T ... ( 基变换公式 ) 上式就称为基( η 1 , η 2 , ⋯ , η n ) \left(\eta_1, \eta_2, \cdots, \eta_n\right) ( η 1 , η 2 , ⋯ , η n ) ( ε 1 , ε 2 , ⋯ , ε n ) \left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) ( ε 1 , ε 2 , ⋯ , ε n ) T T T ( η 1 , η 2 , ⋯ , η n ) \left(\eta_1, \eta_2, \cdots, \eta_n\right) ( η 1 , η 2 , ⋯ , η n ) ( ε 1 , ε 2 , ⋯ , ε n ) \left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) ( ε 1 , ε 2 , ⋯ , ε n )
根据上面的命题,两组基之间的过渡矩阵是可逆矩阵.反过来,从一组给定的基出发,借助于某一可逆矩阵 T T T
坐标变换公式 设 V V V α \alpha α ε 1 , ε 2 , ⋯ , ε n \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n ε 1 , ε 2 , ⋯ , ε n x 1 , x 2 x_1, x_2 x 1 , x 2 ⋯ , x n \cdots, x_n ⋯ , x n
α = x 1 ε 1 + x 2 ε 2 + ⋯ + x n ε n = ( ε 1 , ε 2 , ⋯ , ε n ) [ x 1 x 2 ⋮ x n ] . \alpha=x_1 \varepsilon_1+x_2 \varepsilon_2+\cdots+x_n \varepsilon_n=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right)\left[\begin{array}{c}
x_1 \\
x_2 \\
\vdots \\
x_n
\end{array}\right] . α = x 1 ε 1 + x 2 ε 2 + ⋯ + x n ε n = ( ε 1 , ε 2 , ⋯ , ε n ) x 1 x 2 ⋮ x n . 又设 α \alpha α η 1 , η 2 , ⋯ , η n \eta_1, \eta_2, \cdots, \eta_n η 1 , η 2 , ⋯ , η n x 1 ′ , x 2 ′ , ⋯ , x n ′ x'_1, x'_2, \cdots, x'_n x 1 ′ , x 2 ′ , ⋯ , x n ′
α = x 1 ′ η 1 + x 2 ′ η 2 + ⋯ + x n ′ η n = ( η 1 , η 2 , ⋯ , η n ) [ x 1 ′ x 2 ′ ⋮ x n ′ ] . \alpha=x'_1 \eta_1+x'_2 \eta_2+\cdots+x'_n \eta_n=\left(\eta_1, \eta_2, \cdots, \eta_n\right)\left[\begin{array}{c}
x'_1 \\
x'_2 \\
\vdots \\
x'_n
\end{array}\right] . α = x 1 ′ η 1 + x 2 ′ η 2 + ⋯ + x n ′ η n = ( η 1 , η 2 , ⋯ , η n ) x 1 ′ x 2 ′ ⋮ x n ′ . 现设两组基间的过渡矩阵为 T T T
( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T . \left(\eta_1, \eta_2, \cdots, \eta_n\right)=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) T . ( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T . 令
x = [ x 1 x 2 ⋮ x n ] , x ′ = [ x 1 ′ x 2 ′ ⋮ x n ′ ] \boldsymbol{x}=\left[\begin{array}{c}
x_1 \\
x_2 \\
\vdots \\
x_n
\end{array}\right], \quad \boldsymbol{x'}=\left[\begin{array}{c}
x'_1 \\
x'_2 \\
\vdots \\
x'_n
\end{array}\right] x = x 1 x 2 ⋮ x n , x ′ = x 1 ′ x 2 ′ ⋮ x n ′ 那么
α = ( ε 1 , ε 2 , ⋯ , ε n ) x = ( η 1 , η 2 , ⋯ , η n ) x ′ . \alpha=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) \boldsymbol{x}=\left(\eta_1, \eta_2, \cdots, \eta_n\right) \boldsymbol{x'} . α = ( ε 1 , ε 2 , ⋯ , ε n ) x = ( η 1 , η 2 , ⋯ , η n ) x ′ . 以关系式
( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T \left(\eta_1, \eta_2, \cdots, \eta_n\right)=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) T ( η 1 , η 2 , ⋯ , η n ) = ( ε 1 , ε 2 , ⋯ , ε n ) T 代入,得
( ε 1 , ε 2 , ⋯ , ε n ) x = [ ( ε 1 , ε 2 , ⋯ , ε n ) T ] x ′ = ( ε 1 , ε 2 , ⋯ , ε n ) ( T x ′ ) . \begin{aligned}
\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) \boldsymbol{x} & =\left[\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right) T\right] \boldsymbol{x'}
=\left(\varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n\right)(T \boldsymbol{x'}) .
\end{aligned} ( ε 1 , ε 2 , ⋯ , ε n ) x = [ ( ε 1 , ε 2 , ⋯ , ε n ) T ] x ′ = ( ε 1 , ε 2 , ⋯ , ε n ) ( T x ′ ) . 由于 ε 1 , ε 2 , ⋯ , ε n \varepsilon_1, \varepsilon_2, \cdots, \varepsilon_n ε 1 , ε 2 , ⋯ , ε n
x = T x ′ \boxed{
\boldsymbol{x}=T \boldsymbol{x'}
} x = T x ′ 把上面公式左乘以T − 1 T^{-1} T − 1
x ′ = T − 1 x \boxed{
\boldsymbol{x'}=T^{-1} \boldsymbol{x}
} x ′ = T − 1 x 这就是我们所寻求的坐标变换公式 .
如何求解不同基下的过渡矩阵?通常使用单位坐标基进行转换。
例 取定 R 3 R ^3 R 3 α 1 = ( 1 1 0 ) α 2 = ( 1 0 1 ) , α 3 = ( 0 1 1 ) \alpha _1=\left(\begin{array}{l}1 \\ 1 \\ 0\end{array}\right) \alpha _2=\left(\begin{array}{l}1 \\ 0 \\ 1\end{array}\right), \alpha _3=\left(\begin{array}{l}0 \\ 1 \\ 1\end{array}\right) α 1 = 1 1 0 α 2 = 1 0 1 , α 3 = 0 1 1 β 1 = ( 1 1 − 2 ) , β 2 = ( 1 2 3 ) , β 3 = ( − 1 2 1 ) \beta _1=\left(\begin{array}{c}1 \\ 1 \\ -2\end{array}\right), \beta _2=\left(\begin{array}{l}1 \\ 2 \\ 3\end{array}\right), \beta _3=\left(\begin{array}{l}-1 \\ 2 \\ 1\end{array}\right) β 1 = 1 1 − 2 , β 2 = 1 2 3 , β 3 = − 1 2 1 α 1 , α 2 , α 3 \alpha _1, \alpha _2, \alpha _3 α 1 , α 2 , α 3 β 1 , β 2 , β 3 \beta _1, \beta _2, \beta _3 β 1 , β 2 , β 3 P P P
解 记矩阵 A = ( α 1 , α 2 , α 3 ) , B = ( β 1 , β 2 , β 3 ) A =\left( \alpha _1, \alpha _2, \alpha _3\right) , B =\left( \beta _1, \beta _2, \beta _3\right) A = ( α 1 , α 2 , α 3 ) , B = ( β 1 , β 2 , β 3 ) e 1 , e 2 , e 3 e _1, e _2, e _3 e 1 , e 2 , e 3 α 1 , α 2 , α 3 \alpha _1, \alpha _2, \alpha _3 α 1 , α 2 , α 3 A A A e 1 , e 2 , e 3 e _1, e _2, e _3 e 1 , e 2 , e 3 β 1 , β 2 , β 3 \beta _1, \beta _2, \beta _3 β 1 , β 2 , β 3 B B B
( β 1 , β 2 , β 3 ) = ( e 1 , e 2 , e 3 ) B . . . ① \left( \beta _1, \beta _2, \beta _3\right)=\left( e _1, e _2, e _3\right) B ...① ( β 1 , β 2 , β 3 ) = ( e 1 , e 2 , e 3 ) B ...①
( α 1 , α 2 , α 3 ) = ( e 1 , e 2 , e 3 ) A . . . ② \left( \alpha _1, \alpha _2, \alpha _3\right)=\left( e _1, e _2, e _3\right) A ...② ( α 1 , α 2 , α 3 ) = ( e 1 , e 2 , e 3 ) A ...②
由②得
( α 1 , α 2 , α 3 ) A − 1 = ( e 1 , e 2 , e 3 ) . . . ③ \left( \alpha _1, \alpha _2, \alpha _3\right) A^{-1}=\left( e _1, e _2, e _3\right) ...③ ( α 1 , α 2 , α 3 ) A − 1 = ( e 1 , e 2 , e 3 ) ...③
将③带入① 有
( β 1 , β 2 , β 3 ) = ( e 1 , e 2 , e 3 ) B = ( α 1 , α 2 , α 3 ) A − 1 B \left( \beta _1, \beta _2, \beta _3\right)=\left( e _1, e _2, e _3\right) B =\left( \alpha _1, \alpha _2, \alpha _3\right) A ^{-1} B ( β 1 , β 2 , β 3 ) = ( e 1 , e 2 , e 3 ) B = ( α 1 , α 2 , α 3 ) A − 1 B
记 P = A − 1 B P=A^{-1} B P = A − 1 B P P P α 1 , α 2 , α 3 \alpha_1, \alpha_2, \alpha_3 α 1 , α 2 , α 3 β 1 , β 2 , β 3 \beta_1, \beta_2, \beta_3 β 1 , β 2 , β 3
通过上面推导,可以看到求过渡矩阵的方法:给定两个矩阵A,B,把这2个矩阵组成一个新矩阵 AB, 然后对新矩阵进行初等行变换 ,把A化成单位阵E, 则右侧就是过渡矩阵P,具体请参考 逆矩阵解方程组
即:
把矩阵( A , B ) (A,B) ( A , B ) A A A E E E B B B A − 1 B A^{-1}B A − 1 B
( A ∣ B ) = ( 1 1 0 1 1 − 1 1 0 1 1 2 2 0 1 1 − 2 3 1 ) → ( 1 0 0 2 0 0 0 1 0 − 1 1 − 1 0 0 1 − 1 2 2 ) , (\boldsymbol{A} \mid \boldsymbol{B})=\left(\begin{array}{ccc|ccc}
1 & 1 & 0 & 1 & 1 & -1 \\
1 & 0 & 1 & 1 & 2 & 2 \\
0 & 1 & 1 & -2 & 3 & 1
\end{array}\right) \rightarrow\left(\begin{array}{ccc|ccc}
1 & 0 & 0 & 2 & 0 & 0 \\
0 & 1 & 0 & -1 & 1 & -1 \\
0 & 0 & 1 & -1 & 2 & 2
\end{array}\right), ( A ∣ B ) = 1 1 0 1 0 1 0 1 1 1 1 − 2 1 2 3 − 1 2 1 → 1 0 0 0 1 0 0 0 1 2 − 1 − 1 0 1 2 0 − 1 2 , 因此,
P = A − 1 B = ( 2 0 0 − 1 1 − 1 − 1 2 2 ) \boldsymbol{P}=\boldsymbol{A}^{-1} \boldsymbol{B}=\left(\begin{array}{ccc}
2 & 0 & 0 \\
-1 & 1 & -1 \\
-1 & 2 & 2
\end{array}\right) P = A − 1 B = 2 − 1 − 1 0 1 2 0 − 1 2 上面这个结论要记住
例已知向量α ∈ R 3 \alpha \in R^3 α ∈ R 3
α 1 = ( 1 1 0 ) , α 2 = ( 1 0 1 ) , α 3 = ( 0 1 1 ) 下的坐标是 ( 8 − 2 4 ) , 求 α 在基 β = ( 1 1 − 2 ) , β 2 = ( 1 − 2 3 ) , β = ( − 1 2 1 ) 下的坐标. \alpha _1=\left(\begin{array}{l}
1 \\
1 \\
0
\end{array}\right),
\alpha _2=\left(\begin{array}{l}
1 \\
0 \\
1
\end{array}\right),
\alpha _3=\left(\begin{array}{l}
0 \\
1 \\
1
\end{array}\right) \text { 下的坐标是 }
\left(\begin{array}{l}
8 \\
-2 \\
4
\end{array}\right)
\text {, 求 } \alpha \text { 在基 } \beta =\left(\begin{array}{c}
1 \\
1 \\
-2
\end{array}\right), \beta _2=\left(\begin{array}{l}
1 \\
-2 \\
3
\end{array}\right), \beta =\left(\begin{array}{c}
-1 \\
2 \\
1
\end{array}\right) \text { 下的坐标. } α 1 = 1 1 0 , α 2 = 1 0 1 , α 3 = 0 1 1 下的坐标是 8 − 2 4 , 求 α 在基 β = 1 1 − 2 , β 2 = 1 − 2 3 , β = − 1 2 1 下的坐标 . 解:设 α \alpha α β 1 , β 2 , β 3 \beta _1, \beta _2, \beta _3 β 1 , β 2 , β 3 ( y 1 , y 2 , y 3 ) T \left(y_1, y_2, y_3\right)^{ T } ( y 1 , y 2 , y 3 ) T α 1 , α 2 , α 3 \alpha _1, \alpha _2, \alpha _3 α 1 , α 2 , α 3 β 1 , β 2 , β 3 \beta _1, \beta _2, \beta _3 β 1 , β 2 , β 3 P = ( 2 0 0 − 1 1 − 1 − 1 2 2 ) P=\left(\begin{array}{ccc}2 & 0 & 0 \\ -1 & 1 & -1 \\ -1 & 2 & 2\end{array}\right) P = 2 − 1 − 1 0 1 2 0 − 1 2 逆矩阵 P − 1 = ( 1 2 0 0 3 8 1 2 1 4 − 1 8 − 1 2 1 4 ) P^{-1}=\left(\begin{array}{ccc}\frac{1}{2} & 0 & 0 \\ \frac{3}{8} & \frac{1}{2} & \frac{1}{4} \\ -\frac{1}{8} & -\frac{1}{2} & \frac{1}{4}\end{array}\right) P − 1 = 2 1 8 3 − 8 1 0 2 1 − 2 1 0 4 1 4 1
于是 ( y 1 y 2 y 3 ) = P − 1 ( x 1 x 2 x 3 ) = ( 1 2 0 0 3 8 1 2 1 4 − 1 8 − 1 2 1 4 ) ( 8 − 2 4 ) = ( 4 3 1 ) . \begin{array}{l}\left(\begin{array}{l}y_1 \\ y_2 \\ y_3\end{array}\right)= P ^{-1}\left(\begin{array}{l}x_1 \\ x_2 \\ x_3\end{array}\right)=\left(\begin{array}{ccc}\frac{1}{2} & 0 & 0 \\ \frac{3}{8} & \frac{1}{2} & \frac{1}{4} \\ -\frac{1}{8} & -\frac{1}{2} & \frac{1}{4}\end{array}\right)\left(\begin{array}{c}8 \\ -2 \\ 4\end{array}\right)=\left(\begin{array}{l}4 \\ 3 \\ 1\end{array}\right) .\end{array} y 1 y 2 y 3 = P − 1 x 1 x 2 x 3 = 2 1 8 3 − 8 1 0 2 1 − 2 1 0 4 1 4 1 8 − 2 4 = 4 3 1 .
上面这个例子还可以解释,我在静止地面上看一架飞机的坐标为 ( 8 , − 2 , 4 ) (8,-2,4) ( 8 , − 2 , 4 ) ( 4 , 3 , 1 ) (4,3,1) ( 4 , 3 , 1 )
例 在 K 3 K^3 K 3
ε 1 = ( 1 , 0 , − 1 ) , ε 2 = ( 2 , 1 , 1 ) , ε 3 = ( 1 , 1 , 1 ) ; η 1 = ( 0 , 1 , 1 ) , η 2 = ( − 1 , 1 , 0 ) , η 3 = ( 1 , 2 , 1 ) , \begin{array}{lll}
\varepsilon_1=(1,0,-1), & \varepsilon_2=(2,1,1), & \varepsilon_3=(1,1,1) ; \\
\eta_1=(0,1,1), & \eta_2=(-1,1,0), & \eta_3=(1,2,1),
\end{array} ε 1 = ( 1 , 0 , − 1 ) , η 1 = ( 0 , 1 , 1 ) , ε 2 = ( 2 , 1 , 1 ) , η 2 = ( − 1 , 1 , 0 ) , ε 3 = ( 1 , 1 , 1 ) ; η 3 = ( 1 , 2 , 1 ) , 求它们之间的过渡矩阵 T T T ε 1 , ε 2 , ε 3 \varepsilon_1, \varepsilon_2, \varepsilon_3 ε 1 , ε 2 , ε 3 η 1 , η 2 , η 3 \eta_1, \eta_2, \eta_3 η 1 , η 2 , η 3 A A A B B B
A = [ 1 2 1 0 1 1 − 1 1 1 ] , B = [ 0 − 1 1 1 1 2 1 0 1 ] . A=\left[\begin{array}{rrr}
1 & 2 & 1 \\
0 & 1 & 1 \\
-1 & 1 & 1
\end{array}\right], \quad B=\left[\begin{array}{rrr}
0 & -1 & 1 \\
1 & 1 & 2 \\
1 & 0 & 1
\end{array}\right] . A = 1 0 − 1 2 1 1 1 1 1 , B = 0 1 1 − 1 1 0 1 2 1 . 做初等行变换如下:
( A B ) = [ 1 2 1 0 − 1 1 0 1 1 1 1 2 − 1 1 1 1 0 1 ] → [ 1 2 1 0 − 1 1 0 1 1 1 1 2 0 3 2 1 − 1 2 ] → [ 1 2 1 0 − 1 1 0 1 1 1 1 2 0 0 − 1 − 2 − 4 − 4 ] \begin{aligned}
(A B) & =\left[\begin{array}{rrr:rrr}
1 & 2 & 1 & 0 & -1 & 1 \\
0 & 1 & 1 & 1 & 1 & 2 \\
-1 & 1 & 1 & 1 & 0 & 1
\end{array}\right] \\
& \rightarrow\left[\begin{array}{rrr:rrr}
1 & 2 & 1 & 0 & -1 & 1 \\
0 & 1 & 1 & 1 & 1 & 2 \\
0 & 3 & 2 & 1 & -1 & 2
\end{array}\right] \\
& \rightarrow\left[\begin{array}{rrrrrr}
1 & 2 & 1 & 0 & -1 & 1 \\
0 & 1 & 1 & 1 & 1 & 2 \\
0 & 0 & -1 & -2 & -4 & -4
\end{array}\right]
\end{aligned} ( A B ) = 1 0 − 1 2 1 1 1 1 1 0 1 1 − 1 1 0 1 2 1 → 1 0 0 2 1 3 1 1 2 0 1 1 − 1 1 − 1 1 2 2 → 1 0 0 2 1 0 1 1 − 1 0 1 − 2 − 1 1 − 4 1 2 − 4 于是 → [ 1 2 0 − 2 − 5 − 3 0 1 0 − 1 − 3 − 2 0 0 1 2 4 4 ] → [ 1 0 0 0 1 1 0 1 0 − 1 − 3 − 2 0 0 1 2 4 4 ] . T = [ 0 1 1 − 1 − 3 − 2 2 4 4 ] . \begin{aligned}
&\text { 于是 }\\
&\begin{gathered}
\rightarrow\left[\begin{array}{lll:rrr}
1 & 2 & 0 & -2 & -5 & -3 \\
0 & 1 & 0 & -1 & -3 & -2 \\
0 & 0 & 1 & 2 & 4 & 4
\end{array}\right] \\
\rightarrow\left[\begin{array}{lll:rrr}
1 & 0 & 0 & 0 & 1 & 1 \\
0 & 1 & 0 & -1 & -3 & -2 \\
0 & 0 & 1 & 2 & 4 & 4
\end{array}\right] . \\
T=\left[\begin{array}{rrr}
0 & 1 & 1 \\
-1 & -3 & -2 \\
2 & 4 & 4
\end{array}\right] .
\end{gathered}
\end{aligned} 于是 → 1 0 0 2 1 0 0 0 1 − 2 − 1 2 − 5 − 3 4 − 3 − 2 4 → 1 0 0 0 1 0 0 0 1 0 − 1 2 1 − 3 4 1 − 2 4 . T = 0 − 1 2 1 − 3 4 1 − 2 4 . 例在 P [ x ] 4 P[x]_4 P [ x ] 4 p 0 = 1 , p 1 = x , p 2 = x 2 , p 3 = x 3 , p 4 = x 4 p_0=1, p_1=x, p_2=x^2, p_3=x^3, p_4=x^4 p 0 = 1 , p 1 = x , p 2 = x 2 , p 3 = x 3 , p 4 = x 4 q 0 = 1 , q 1 = 1 + x , q 2 = ( 1 + x ) 2 , q 3 = ( 1 + x ) 3 , q 4 = ( 1 + x ) 4 q_0=1, q_1=1+x, q_2=(1+x)^2, q_3=(1+x)^3, q_4=(1+x)^4 q 0 = 1 , q 1 = 1 + x , q 2 = ( 1 + x ) 2 , q 3 = ( 1 + x ) 3 , q 4 = ( 1 + x ) 4 p 0 , p 1 , p 2 , p 3 , p 4 p_0, p_1, p_2, p_3, p_4 p 0 , p 1 , p 2 , p 3 , p 4 q 0 , q 1 , q 2 , q 3 , q 4 q_0, q_1, q_2, q_3, q_4 q 0 , q 1 , q 2 , q 3 , q 4 p = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + a 4 x 4 p=a_0+a_1 x+a_2 x^2+a_3 x^3+a_4 x^4 p = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + a 4 x 4
解:解 将 q 0 , q 1 , q 2 , q 3 , q 4 q_0, q_1, q_2, q_3, q_4 q 0 , q 1 , q 2 , q 3 , q 4 p 0 , p 1 , p 2 , p 3 , p 4 p_0, p_1, p_2, p_3, p_4 p 0 , p 1 , p 2 , p 3 , p 4
( 1 , 1 + x , ( 1 + x ) 2 , ( 1 + x ) 3 , ( 1 + x ) 4 ) = ( 1 , x , x 2 , x 3 , x 4 ) ( 1 1 1 1 1 0 1 2 3 4 0 0 1 3 6 0 0 0 1 4 0 0 0 0 1 ) \left(1,1+x,(1+x)^2,(1+x)^3,(1+x)^4\right)=\left(1, x, x^2, x^3, x^4\right)\left(\begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \\
0 & 1 & 2 & 3 & 4 \\
0 & 0 & 1 & 3 & 6 \\
0 & 0 & 0 & 1 & 4 \\
0 & 0 & 0 & 0 & 1
\end{array}\right) ( 1 , 1 + x , ( 1 + x ) 2 , ( 1 + x ) 3 , ( 1 + x ) 4 ) = ( 1 , x , x 2 , x 3 , x 4 ) 1 0 0 0 0 1 1 0 0 0 1 2 1 0 0 1 3 3 1 0 1 4 6 4 1 因此,从基 p 0 , p 1 , p 2 , p 3 , p 4 p_0, p_1, p_2, p_3, p_4 p 0 , p 1 , p 2 , p 3 , p 4 q 0 , q 1 , q 2 , q 3 , q 4 q_0, q_1, q_2, q_3, q_4 q 0 , q 1 , q 2 , q 3 , q 4
P = ( 1 1 1 1 1 0 1 2 3 4 0 0 1 3 6 0 0 0 1 4 0 0 0 0 1 ) P =\left(\begin{array}{lllll}
1 & 1 & 1 & 1 & 1 \\
0 & 1 & 2 & 3 & 4 \\
0 & 0 & 1 & 3 & 6 \\
0 & 0 & 0 & 1 & 4 \\
0 & 0 & 0 & 0 & 1
\end{array}\right) P = 1 0 0 0 0 1 1 0 0 0 1 2 1 0 0 1 3 3 1 0 1 4 6 4 1 设任一不超过 4 次的多项式 p = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + a 4 x 4 p=a_0+a_1 x+a_2 x^2+a_3 x^3+a_4 x^4 p = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + a 4 x 4 q 0 , q 1 , q 2 , q 3 , q 4 q_0, q_1, q_2, q_3, q_4 q 0 , q 1 , q 2 , q 3 , q 4
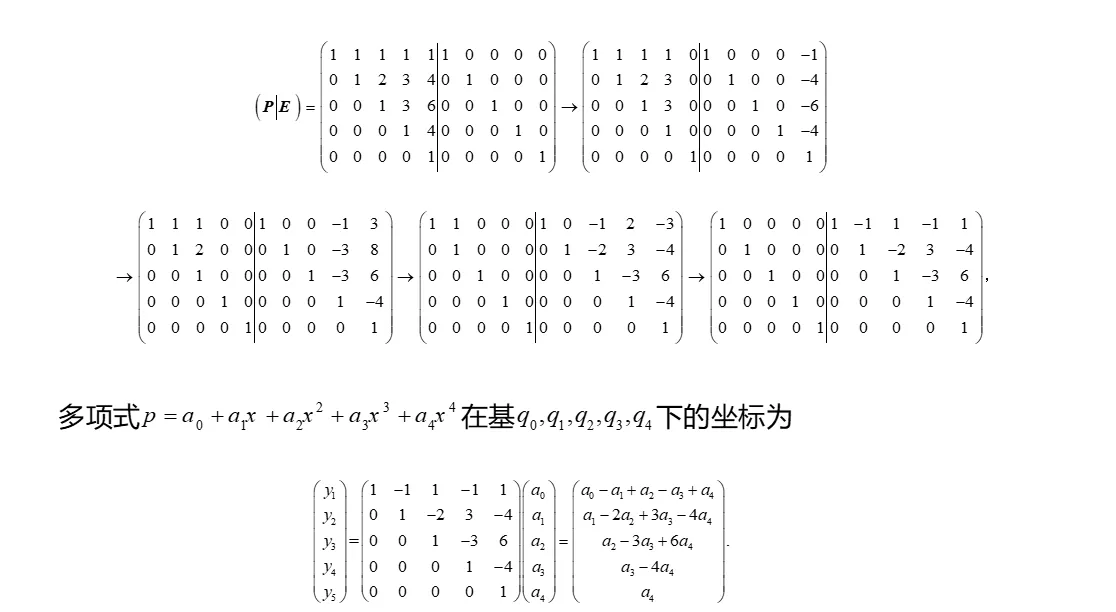
( y 1 , y 2 , y 3 , y 4 , y 5 ) T , \left(y_1, y_2, y_3, y_4, y_5\right)^{\mathrm{T}} \text {, } ( y 1 , y 2 , y 3 , y 4 , y 5 ) T , 由上面知,这个多项式在基 p 0 , p 1 , p 2 , p 3 , p 4 p_0, p_1, p_2, p_3, p_4 p 0 , p 1 , p 2 , p 3 , p 4 ( y 1 , y 2 , y 3 , y 4 , y 5 ) T \left(y_1, y_2, y_3, y_4, y_5\right)^{\mathrm{T}} ( y 1 , y 2 , y 3 , y 4 , y 5 ) T
( a 0 a 1 a 2 a 3 a 4 ) = P ( y 1 y 2 y 3 y 4 y 5 ) 或 ( y 1 y 2 y 3 y 4 y 5 ) = P − 1 ( a 0 a 1 a 2 a 3 a 4 ) . \left(\begin{array}{l}
a_0 \\
a_1 \\
a_2 \\
a_3 \\
a_4
\end{array}\right)=\boldsymbol{P}\left(\begin{array}{l}
y_1 \\
y_2 \\
y_3 \\
y_4 \\
y_5
\end{array}\right) \text { 或 }\left(\begin{array}{l}
y_1 \\
y_2 \\
y_3 \\
y_4 \\
y_5
\end{array}\right)=\boldsymbol{P}^{-1}\left(\begin{array}{l}
a_0 \\
a_1 \\
a_2 \\
a_3 \\
a_4
\end{array}\right) \text {. } a 0 a 1 a 2 a 3 a 4 = P y 1 y 2 y 3 y 4 y 5 或 y 1 y 2 y 3 y 4 y 5 = P − 1 a 0 a 1 a 2 a 3 a 4 . 用矩阵的初等行变换求 P − 1 ,把矩阵 ( P , E ) 中的 P 变成 E ,则 E 即变成 P − 1 . 计算如下 \text { 用矩阵的初等行变换求 } P^{-1} \text { ,把矩阵 }(P, E) \text { 中的 } P \text { 变成 } E \text { ,则 } E \text { 即变成 } P^{-1} \text {. 计算如下 } 用矩阵的初等行变换求 P − 1 ,把矩阵 ( P , E ) 中的 P 变成 E ,则 E 即变成 P − 1 . 计算如下
 {width=550px}
{width=550px}