二维投影
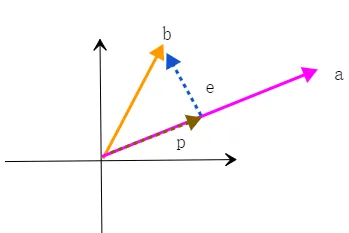
向量投影是向量空间到自身的线性变换。例如在二维平面上,有两个向量 a和b。 向量b在向量a上的投影,是自b向a做垂线,我们把这个投影向量命名为 p。
由于p是投影到a上的,所以我们可以用某个常数系数x来表示p相对于a的位置。
此外,我们还可以定义另一个向量e,它与a正交如下图。如果把所有关系都写下来,就会变成这样。
根据高中向量平面向量的运行性质,很容易得出下面的性质
(1)p=xa ( x为常数,向量共线定理)
(2)e=b−p (向量减法的三角形法则详见此处)
(3)ae=0 (向量正交定义,几何意义详见此处)
由了上面的三个等式后,我们的目标是投影向量p能用a,b向量表示。把(1)(2)(3)当做普通方程来解即可。
答案如下:
① 将 (1) 带入 (2) :
e=b−xa ...(4)
②将(4)带入(3)得:
a(b−xa)=0 即
ab−axa=0
③因为 x 为常数,可以提取到前面
ab−xaa=0 即得到
x=aaab...(5) 将(5)带入(1)式得
p=aaaba...(1.1) 这就是投影公式,要完全理解这个等式可能比较困难,下面让我举一个具体的例子就明白了。
举例
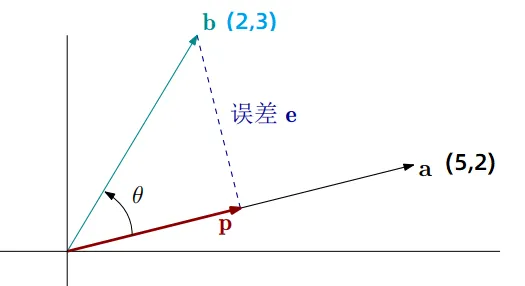
假设有两个向量: a=(5,2) 和 b=(2,3) 计算b在a 上的投影。
 {width=350px}
{width=350px}
我们先计算一下 x=aaab
因为两个向量内积,为两个向量坐标分量直接乘积,所以,
ab=5∗2+2∗3=16
aa=52+22=29
所以x=2916
所以 p=xa=2916(5,2)=(2980,2932)
现在你可以看到,投影向量 p只不过是向量a的缩放版本。
投影矩阵
给定 a∈Rm 和 b∈Rm ,上面我们从向量的角度除非,给出了 b 在 a 上的投影 p。现在再从矩阵的角度理解这个问题:能否找到一个矩阵 P ,使得我们有:
Pb=p 可以证明
P=a⊤aaa⊤ 这里 P 是一个 m×m 的矩阵。
证明.
Pb=a⊤aaa⊤b=a⊤aaa⊤b=a⊤aa⊤ba=a⊤aa⊤ba=p 三维投影
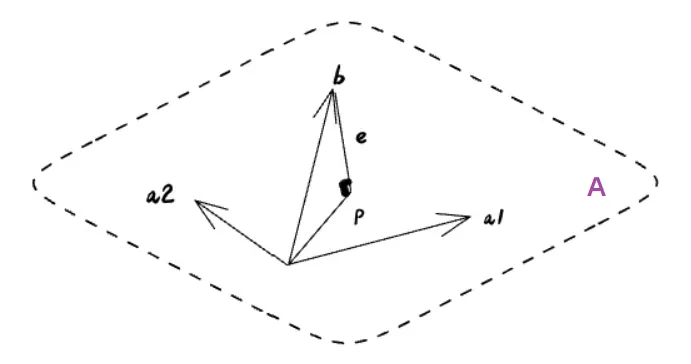
如下图:
1.平面A是 a1 和 a2 张成的平面。
2.a1 和 a2 是 A 的列向量
即:
A=[a1a2] 我们看到的平面是一个列空间,由列向量 a1和 a2 表示。A 是一个矩阵,其中包含了这些列向量。现在我们要做的是将不在这个平面上的向量b投影到平面上。
就像在二维示例中一样,我们定义了两个向量 p和e。
 {width=450px}
{width=450px}
1.因为 p 在平面内,所以 p 可以表示为 a1,a2 的线性组合, x1,x2 为常数
p=Ax=x1a1+x2a2 2.在 b,p 平面内,向量 e 依然可以表示为:
e=b−p=b−Ax 由于e 垂直于平面,根据两个向量垂直内积为零,可以建立如下两个方程。
{a1e=0a2e=0 将这两个等式合并并进行相应的修改,我们就得到了缩放因子x. 然后将 e 代入后
[a1a2](b−Ax)=[00] 通过解这个方程也可以求得投影P向量。
有了上面二维和三维作为铺垫,现在可以推广到n维了。
n维向量投影
对 Rn 中给出的非零向量 u, 考虑 Rn 中一个向量 y 分解为两个向量之和的问题, 一个向量是向量 u 的数量乘积,另一个向量与 u 垂直。根据向量运算的平行四边形法则,我们期望写成
y=y^+z...(1) 其中 y^=αu,α 是一个数, z 是一个垂直于 u 的向量,见下图.
对给定数 α, 记 z=y−αu,则方程(1)可以满足,那么 y−y^ 和 u 正交的充分必要条件是
0=(y−αu)⋅u=y⋅u−(αu)⋅u=y⋅u−α(u⋅u) 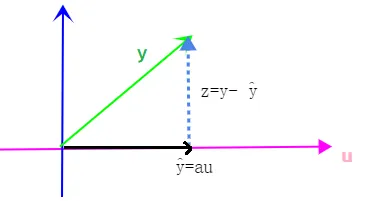
也就是满足方程 (1), 且 z 与 u 正交的充分必要条件是
α=u⋅uy⋅u 且
y^=u⋅uy⋅u⋅u 这就是投影公式。
向量 y^ 称为 y 在 u上的正交投影,向量 z 称为 y 垂直 u 的分量.
。有时用 projLy 来表示 y^, 并称之为 y 在 u 上的正交投影, 即
y^=projLy=u⋅uy⋅u⋅u...(2) 例题
例 假设 y=[76] 和 u=[42], 找出 y 在 u 上的正交投影, 然后将 y 写成两个正交向量之和,一个在 Span{u}, 另一个与 u 正交.
解 计算
y⋅u=[76]⋅[42]=40u⋅u=[42]⋅[42]=20 则 y 在 u 上的正交投影是:
y^=u⋅uy⋅u⋅u=2040u=2[42]=[84] y 垂直于 u 的分量是:
y−y^=[76]−[84]=[−12] 两个向量之和为 y, 即
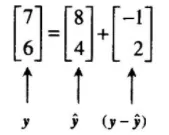
向量 y 的分解可表示为下图.
作为检验、计算
y^⋅(y−y^)=[84]⋅[−12]=−8+8=0 从高中物理的角度上看,合力y被分解为一个是沿着u方向的水平力,一个是沿着y−y^方向上的垂直力。
向量间的距离
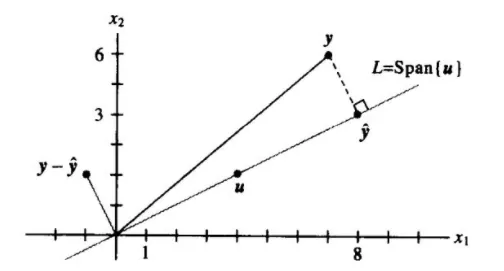
由于上图中连接 y 与 y^ 的线段垂直于 L, 由 y^ 的构造可知, 标记为 y^ 的点是 y 距离 L 的最近点. (这可用几何方法证明,)
例 计算上例中从 y 到 L 的距离。
解 从 y 到 L 的距离,是从 y 到正交投影垂直线段的长度,这个长度等于 y−y^ 的长度,从而距离为
∥y−y^∥=(−1)2+22=5 几何解释
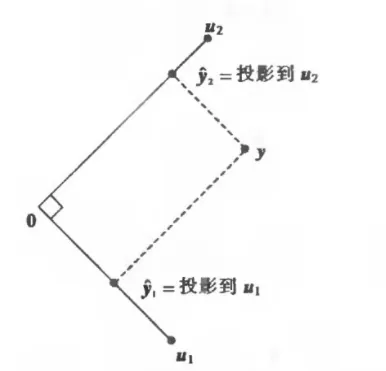
对于 W=R2=Span{u1,u2},u1 和 u2 相互正交的情形,很容易看到分解式,对任意 R2 中的向量 y 可以写成:
y=u1⋅u1y⋅u1u1+u2⋅u2y⋅u2u2...(3) (3)中的第一项是 y 在子空间 Span{u1} 上的投影(通过原点和 u1 的直线),第二项 y 在子空间 Span {u2} 上的投影,(3)式将 y 表示为由 y1 和 y2 确定的(正交)轴上的投影之和,
单位正交集
集合 {u1,⋯,up} 是一个单位正交集,如果它是由单位向量构成的正交集。如果 W 是一个由单位正交集合组成的子空间,那么 {u1,⋯,up} 是 W 的单位正交基,原因是这类集合自然线性无关.
最简单的单位正交集合是 Rn 中的标准基 {e1,⋯,en}, 任何集合 {e1,⋯,en} 的非空子集也是单位正交的, 下面是一个更复杂的例子.
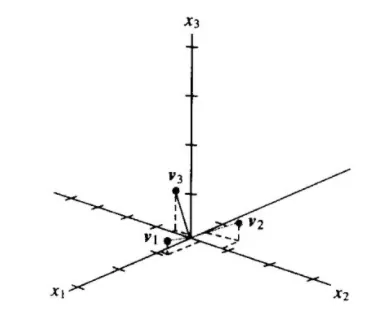
例 证明 {u1,u2,u3} 是 R3 的一个单位正交基, 其中:
v1=3/111/111/11v2=−1/62/61/6v3=−1/66−4/667/66 解 计算
v1⋅v2=−3/66+2/66+1/66=0v1⋅v3=−3/726−4/726+7/726=0v2⋅v3=1/396−8/396+7/396=0 从而 {v1,v2,v3} 是一个正交基, 另外
v1⋅v1=9/11+1/11+1/11=1v2⋅v2=1/6+4/6+1/6=1v3⋅v3=1/66+16/66+49/66=1 从而证明 v1,v2 和 v3 是单位向量,即 {v1,v2,v3} 是一个单位正交集。由于集合线性无关,它的 ∵ 个向量构成 R3 的一个基, 见图
 当一个正交集中的向量被 "单位化" 具有单位长度后, 这些新向量仍然保持正交性, 因此新的集合成为单位正交基
当一个正交集中的向量被 "单位化" 具有单位长度后, 这些新向量仍然保持正交性, 因此新的集合成为单位正交基